



版權說明:本文檔由用戶提供并上傳,收益歸屬內容提供方,若內容存在侵權,請進行舉報或認領
文檔簡介
1、 機械原理課程虛擬樣機仿真實驗報告 題 目: 基于ADAMS的六桿機構的運動學分析 姓 名: 學 號: 班 級: 2016年5月30日基于ADAMS的六桿機構的運動學分析14041034 閆響北京航空航天大學 能源與動力工程學院 (北京 100191)摘 要本文主要針對六桿機構,理論分析了該機構各輸出構件的位置、速度和加速度的變化規律;并利用ADAMS軟件對機構進行了建模仿真,得到了各輸出構件的位置、速度和加速度的變化曲線;通過仿真結果與理論分析的比較,驗證了理論分析的正確性。 關鍵詞: ADAMS;六桿機構;運動學分析.13目 錄1、題目要求12、機構位置、速度及加速度方程的求解42.1 求
2、解C構件位置、速度、加速度(解析法)42.2 求解E構件位置、速度、加速度(解析法)63、ADAMS軟件仿真模型的建立及結果分析103.1仿真模型的建立113.2仿真結果分析114、結束語13參考文獻:131、題目要求圖1已知圖1所示六桿機構中,CAE = 90°, lAB = 150 mm, lAC = 550 mm, lBD = 80 mm, lDE = 500 mm, w1 = 10 rad/s。其中,桿件AB為主動件,滑塊C和滑塊E為輸出構件。求BAE = 45°時構件3的角速度和角加速度和點E的速度和加速度。 圖12、機構位置、速度及加速度方程的求解輸出構件為構件
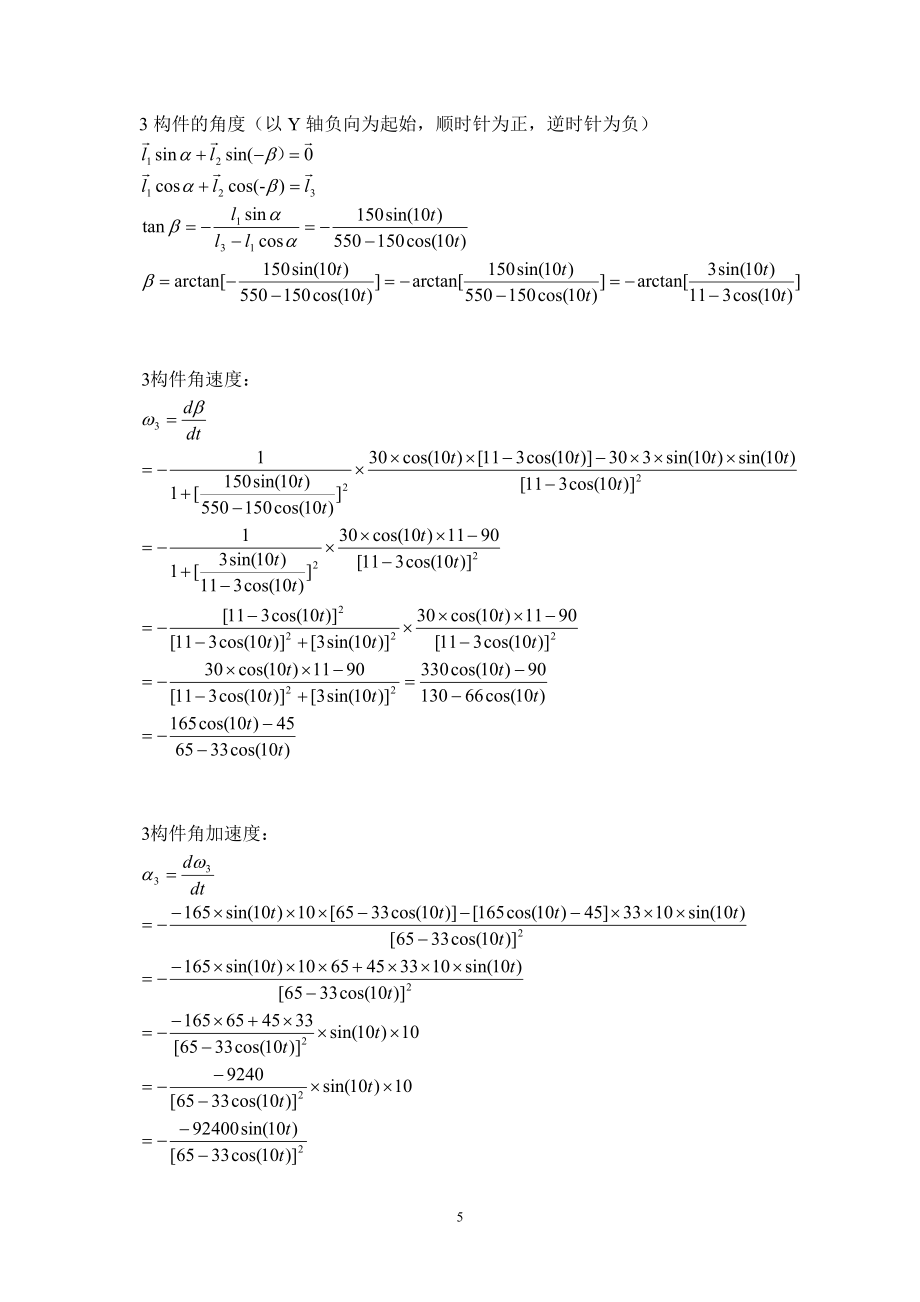
3、C與構建E。應用解析法求解兩構件位置、速度、加速度方程。2.1 求解C構件位置、速度、加速度(解析法)建立如圖2所示的坐標系。因為在ADAMS坐標系中,垂直紙面向外的方向為Z軸正向,為使其互相吻合,設定 向右為正,向左為負。圖23構件的角度(以Y軸負向為起始,順時針為正,逆時針為負)當BAE = 45°時,t為0.55s:2.2 求解E構件位置、速度、加速度(解析法)E構建的位置(用橫坐標表示):滑塊的速度公式與加速度公式過長且過于復雜,化簡已意義不大,因此將公式拆分成幾個層次,分層次計算,降低計算難度。E構件的速度:E構件的加速度:當BAE = 45°時3、ADAMS軟件
4、仿真模型的建立及結果分析3.1仿真模型的建立3.2仿真結果分析其中構件C在ADAMS中為PART_10,構件E在ADAMS中為PART_9。構件C角速度:構件C角加速度:構件E位置:構件E速度:構件E加速度:理論結果與仿真結果對比:BAE = 45°理論結果仿真結果構件C角速度-1.72-1.75rad/s構件C角加速度-37.6535.08構件E位置639.53mm640mm構件E速度-1293.05mm/s-1250mm/s構件E加速度-6216.47-6000綜上,仿真結果與理論計算的結果基本吻合,可以說明理論計算的方法是正確的,結果是可信的。而采用ADAMS軟件的仿真,尤其對于理論分析起來非常困難的模型來說,是一種相對而言更便捷的方法。4、結束語運用ADAMS虛擬樣機仿真分析軟件,可以快速方便的建立機構的模型,并對其進行運動學與動力學仿真。由于虛擬樣機有別于物理樣機,只要能夠表達機構真實的運動情況即可,并不需要完全再現機構本身的所有細節。通過對模型進行參數化,可以實現設計參數的可更改性和關聯性,對提高設計效率和產品系列化有重要意義。虛擬樣機具有低成本,易復制,易系列化等特點,對于節約設計成本和縮短產品開發
溫馨提示
- 1. 本站所有資源如無特殊說明,都需要本地電腦安裝OFFICE2007和PDF閱讀器。圖紙軟件為CAD,CAXA,PROE,UG,SolidWorks等.壓縮文件請下載最新的WinRAR軟件解壓。
- 2. 本站的文檔不包含任何第三方提供的附件圖紙等,如果需要附件,請聯系上傳者。文件的所有權益歸上傳用戶所有。
- 3. 本站RAR壓縮包中若帶圖紙,網頁內容里面會有圖紙預覽,若沒有圖紙預覽就沒有圖紙。
- 4. 未經權益所有人同意不得將文件中的內容挪作商業或盈利用途。
- 5. 人人文庫網僅提供信息存儲空間,僅對用戶上傳內容的表現方式做保護處理,對用戶上傳分享的文檔內容本身不做任何修改或編輯,并不能對任何下載內容負責。
- 6. 下載文件中如有侵權或不適當內容,請與我們聯系,我們立即糾正。
- 7. 本站不保證下載資源的準確性、安全性和完整性, 同時也不承擔用戶因使用這些下載資源對自己和他人造成任何形式的傷害或損失。
最新文檔
- 粘土磚瓦市場營銷策略考核試卷
- 稀有稀土金屬壓延加工質量控制技術考核試卷
- 民宿的設計與開發
- 空氣呼吸器的使用方法
- 耳緣靜脈麻醉技術規范
- 外科消毒隔離管理規范
- 慢性疾病防治與管理要點
- 眼瞼腫物切除皮瓣設計
- trans-Clopenthixol-E-Clopenthixol-生命科學試劑-MCE
- BMS-309403-Standard-生命科學試劑-MCE
- 2025年教師招聘教師資格面試逐字稿初中體育教師招聘面試《排球正面雙手墊球》試講稿(逐字稿)
- 公共危機管理(本)-第五次形成性考核-國開(BJ)-參考資料
- 基于SLM工藝的點陣結構優化設計的工藝要素研究
- 太陽能路燈施工方案
- 《商務數據分析》課件-缺失數據處理
- 2024北京海淀初一(上)期中數學試卷及答案解析
- 《思想政治教育方法論》考研(第3版)鄭永廷配套考試題庫及答案【含名校真題、典型題】
- 2025版國家開放大學法學本科《國際私法》歷年期末紙質考試案例題題庫
- 【MOOC】機械原理-西北工業大學 中國大學慕課MOOC答案
- 彩票參數及公式
- 中華傳統文化進中小學課程教材指南
評論
0/150
提交評論