



版權說明:本文檔由用戶提供并上傳,收益歸屬內容提供方,若內容存在侵權,請進行舉報或認領
文檔簡介
1、前言 隨著現代科學技術的發展,管道運輸作為一種高效、安全、可靠的手段應用日益廣泛,城市中的地下排水系統、取暖系統、煤氣系統、自來水系統等都應用了各種管道;另外,在現代工農業、石油、化學、核工業等領域也大量使用了管道。經過長期使用,它們會出現裂紋、腐蝕、堵塞等故障。有的管道中輸送的是劇毒或放射性介質,若這些管道產生裂紋、漏孔會造成介質泄漏,引起事故甚至發生災難。為了防患于未然,必須對這些管道進行定期檢測和維修。但是它們有的埋在地下,甚至埋在海底,有的口徑很小,人無法進入。挖出管道進行檢測、維修既不經濟又不現實,由此可見,管道機器人有著廣闊的市場。我國早在1987年就開展了管內機器人的研究,并試制
2、了幾種模型,但總體水平較國外差。管內機器人研究是機電一體化的高科技研究項目。在石油、化工、核工業、給排水等許多管道工程中,都需要進行管內檢測、噴涂及加工等工作,管內機器人在完成這些工作中會發揮重要作用,因此,開發研究管內機器人意義很大1。本次題目的內容就是設計一種可在油管內壁爬行,并且搭載工作體的部分可協助工作體完成相應作業的機器人。采用機械結構和電氣控制來達到設計目的。要實現的理想過程是:人對主機輸入一個控制信號,可以通過單片機對電機、電磁鐵進行電氣控制,從而使機器人能夠按照所搭載工作體的要求進行移動,并在工作體的工作位置做出相應的輔助動作。機器人在行進過程中可在任意位置停止前進,并可以在該
3、位置開始作業,工作體可在步進電機驅動下完成小于360度的任意角度的旋轉。1 方案的結構選擇11 總體選擇總體上,本次設計主要采用機械結構設計來完成指定的動作,而用電氣設計來控制這些動作。12 前進方案的選擇 目前在管道內機器人的行進方式多種多樣,本設計采用蠕動式行進的方式。前進方案由旋轉式步進電機、直線式步進電機、氣缸中進行選擇。現將3種方式在本設計中的應用進行比較。由于本設計前進方式為直線,所以其中使用直線式電機最為簡便,直線電機的電機軸是絲杠形式的,于是可以通過絲杠的導程來計算機器人的行進距離。使用旋轉式步進電機的原理與直線式步進電機相似,可通過一個小型連軸器與絲杠相連組成一個直線式步進電
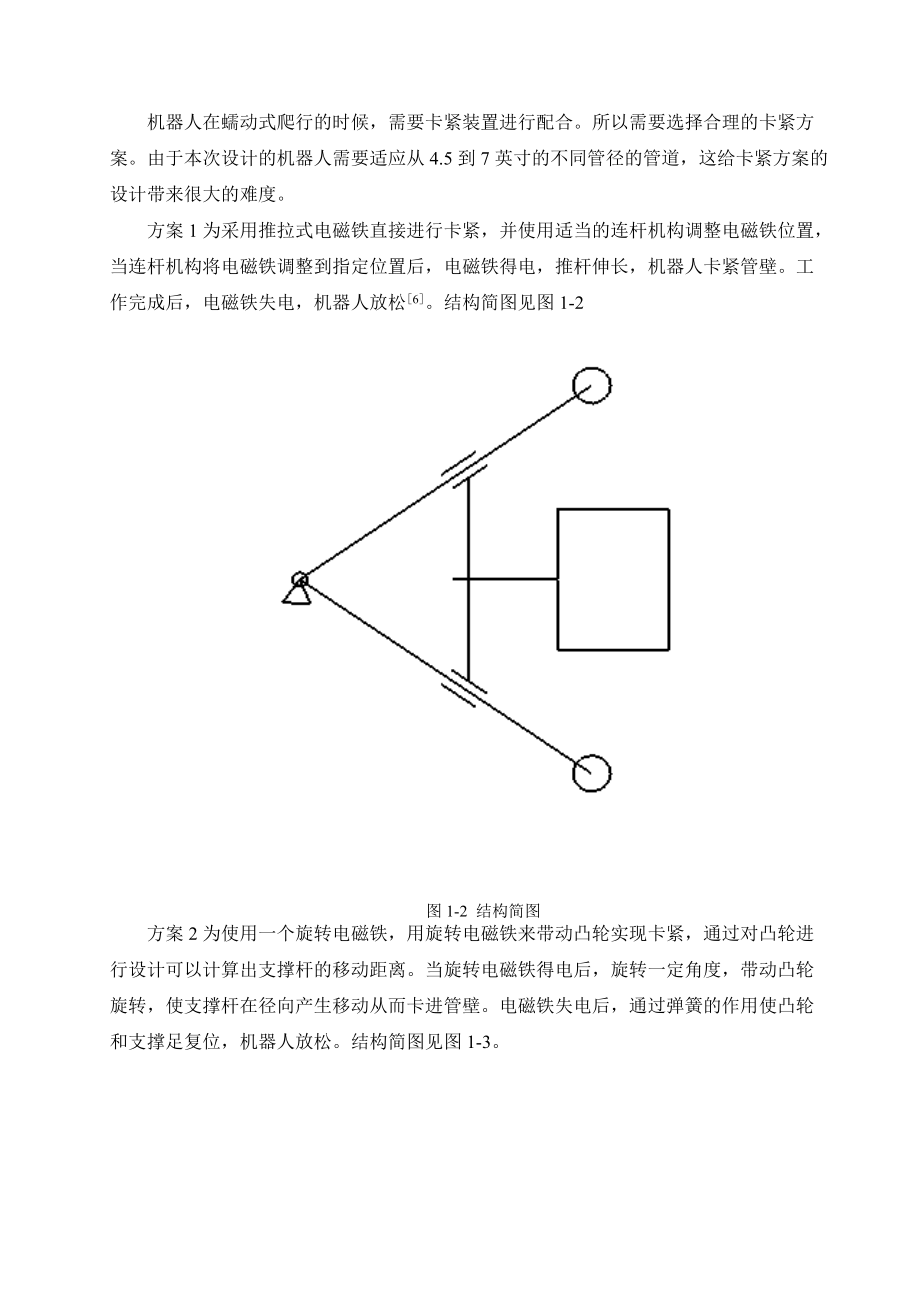
4、機,也可以通過一組齒輪減速器將絲杠與電機軸相連,簡圖見圖1-1。圖1-1 結構簡圖第三種方法是使用氣缸推動機器人前進。綜合比較三種方法后發現,氣缸實現直線運動過程簡單,但其行程不易控制,要實現精確控制需要成本過高。兩種步進電機的特點相似,但直線式的步進電機在安裝時不易對心,且價格遠高于旋轉式步進電機。所以綜合考慮最終選擇采用旋轉電機的方案。13 卡緊方案的選擇 機器人在蠕動式爬行的時候,需要卡緊裝置進行配合。所以需要選擇合理的卡緊方案。由于本次設計的機器人需要適應從4.5到7英寸的不同管徑的管道,這給卡緊方案的設計帶來很大的難度。方案1為采用推拉式電磁鐵直接進行卡緊,并使用適當的連桿機構調整電
5、磁鐵位置,當連桿機構將電磁鐵調整到指定位置后,電磁鐵得電,推桿伸長,機器人卡緊管壁。工作完成后,電磁鐵失電,機器人放松6。結構簡圖見圖1-2圖1-2 結構簡圖方案2為使用一個旋轉電磁鐵,用旋轉電磁鐵來帶動凸輪實現卡緊,通過對凸輪進行設計可以計算出支撐桿的移動距離。當旋轉電磁鐵得電后,旋轉一定角度,帶動凸輪旋轉,使支撐桿在徑向產生移動從而卡進管壁。電磁鐵失電后,通過彈簧的作用使凸輪和支撐足復位,機器人放松。結構簡圖見圖1-3。圖1-3 結構簡圖Diagram 1-3 structure sketch plans方案3為使用一推拉式電磁鐵推動錐形滑塊,同時設計三個長度可調的支撐桿,當電磁鐵得電后,
6、電磁鐵推桿伸出并帶動錐形滑塊沿軸向前進。由于滑塊為錐形,支撐足產生徑向移動,機器人被卡緊7。電磁鐵失電后,機器人放松,原理同方案2。結構簡圖見圖1-4。圖1-4 結構簡圖Diagram 1-4 structure sketch plans綜合比較以上三種方案,首先放棄了方案1,由于管道內空間有限,電磁鐵的體積太大,無法合理的安放電磁鐵,并且電磁鐵的重量也相對較大,設計與之相應的連桿機構也很困難。方案2與方案3在原理上基本相同,不同之處在于方案2用的是凸輪,而方案3用的是錐形滑塊。凸輪的結構復雜,且其表面需要非常光滑,由于凸輪曲面為復雜曲面,所以普通磨床難以加工,需用數控加工中心進行加工,這樣加
7、大了成本。經過綜合比較決定選擇方案3。另外,在卡緊方面也可使用氣缸,此類型的設備已被開發,但由于空間問題并不適合于本設計,故本設計不使用該方法。14 旋轉方案的選擇 旋轉部分采用一個旋轉式步進電機,電機軸帶動法蘭,可在法蘭上連接工作體,通過控制步進電機的轉動角度來控制工作體的轉動。結構如圖1-5所示。圖1-5Diagram 1-515 調節方案的選擇由于本次設計的機器人要適應不同的管徑,所以需要設計一個結構合理的可調機構。初步擬訂3個方案,方案1采用一個推拉式電磁鐵推動一個連桿機構,結構與卡緊方案1相似,結構簡圖見圖1-2。通過控制推桿伸出的長度及連桿機構來調整支撐足。方案2也是一種連桿機構,
8、結構見圖1-6。通過調整螺栓來調整支撐足的高度。它的結構與汽車修理廠所用千斤頂相似。圖1-6 結構簡圖Diagram 1-6 structure sketch plans方案3較為簡單,將支撐桿上做出幾個槽,槽的位置分別與機器人所需要工作的管徑相對應,在外安裝套筒,并在套筒上開螺紋孔,通過緊釘螺釘將支撐桿與套筒相連。再將套筒與機體相連,通過緊定螺釘與不同槽之間的配合來適應不同的管徑。結構詳見圖1-7。圖1-7 結構簡圖Diagram 1-7 structure sketch plans再對以上三種方案進行比較,方案1的自動化程度很高,可以通過控制計算機來控制調整機構,節省了人力。方案2的機構很
9、合理,調整方便。但由于管道內空間的限制,這個方案都很難在本設計中應用,而方案3雖然不是最精確的,但它制造方便,并且在空間上設計的很合理。并且為可換,在需要適應新的管徑的時候,只需要重新制造支撐桿,十分方便。本設計采用方案3。16 結構方案改進 機器人采用絲杠來推動前進,在前進過程中對于部分機體的旋轉自由度沒有加以限制,所以不排除機器人在前進過程中產生旋轉。為了防止旋轉,我們在絲杠的平行方向上加一根光杠。這樣機器人在前進時,當一端被卡緊時,另一部分的旋轉自由度也被加以限制,防止了旋轉的發生。機器人在前進的過程中,管道內的情況不明。有些管道的內表面已經作了加工,為了防止劃傷管道內表面,我們在機器人
10、的三大部分上分別加上三組小輪,這樣不僅可以減小摩擦力,通過對小輪表面材料的選擇也可以起到保護管道內表面的作用。由于機器人所載工作體需做小于360°的旋轉,所以應該最大限度的保證機器人的中心與管道的中心重合,這樣工作體就是繞管道的中心旋轉。采用三足支撐的方法進行自動定心,同時在其中一個支撐足上安裝彈簧,使三個支撐足同時抵在管壁上,保證定心。并將防劃傷的小輪安裝在這三個支撐足上。結構如圖1-8所示。圖1-8 結構簡圖Diagram 1-8 structure sketch plans在原理上可以將卡緊與支撐用一個機構來執行,但是由于支撐足上安裝了用來減小摩擦力的小輪,這樣電磁鐵產生的卡緊
11、力將不足以卡緊,將定心與卡緊分離,可以保證卡緊力,只要在結構上做的盡量緊湊,充分考慮空間因素,問題將得到解決。2 主要部件的計算選擇21 步進電機的選擇本次設計步進電機共使用兩個,兩個電機的功能不同所用型號也不相同。我們先對行進用的電機進行選擇。本次設計中的前進動力全部來自這個步進電機,所以該電機提供推力必須能夠推動整個機體。機器人制造材料為鋁,鋁的密度為 Kg/m3可得整個機體的質量約為1.5千克。 由于機器人工作環境所限預計工作體的質量為1.5千克。機器人整體的質量主要由機體、工作體、電磁鐵和電機的質量組成,初步選擇兩個電機的質量約為0.75千克。兩個電磁鐵的質量為0.35千克,再補充其它
12、部件的質量,整個機器人的質量約為5千克。機器人在管道內所受的阻力來自于小輪與管壁的滾動摩擦力。小輪與油管內壁間的摩擦系數決定了機器人所需推力。 根據工程實踐經驗可知,滾動摩擦系數在0.1與0.2之間,這里為保證推力,取摩擦系數為0.2。得出為使機器人前進所需推力為 9.8N 。旋轉電機所輸出的轉距由絲杠轉化為直線運動,絲杠推力由螺旋副產生,由于推力已得出,所以計算所得的螺旋副間的摩擦阻力矩即所選電機需要滿足的轉矩。計算摩擦力矩時借鑒螺紋預緊的扭緊力矩的計算方法8。螺栓由于扭緊力矩T作用,使螺栓和被連接面之間產生預緊力F0 。由機械原理可知,扭緊力矩T等于螺旋副間的摩擦阻力矩T1(即本設計中所需
13、求的轉矩)和螺母環形面與被連接件支撐面間 的摩擦阻力矩之和, 即 (2-1)螺旋副間的摩擦力矩為 (2-2)螺母與支承面間的摩擦力矩為 (2-3)將(2-2)、(2-3) 、代入(2-1),得 (2-4)表2-1綜合考慮螺紋升角;螺旋副的當量摩擦角(f為摩擦系數,無潤滑時f);螺母與支承面間的摩擦系數可得 (2-5)因為絲杠傳動過程中并無螺母與支承面間的摩擦阻力矩T2,所以可利用公式(2-5)計算本設計中所用電機的轉距,并且計算出的轉距一定大于推力所用的轉矩,在選用電機時留出了工作余量。由于在工作的絲杠與電機軸之間使用了一組齒輪減數器,Z1=20,Z2=36,。計算得出所需電機轉矩為在考慮到空
14、間、質量因素后決定采用35BYG310型步進電機,電機各項參數如表3-1所示: (通用技術參數)混合式步進電機步 距 角 1.8°±5%絕緣電阻 500V DC 100M Min絕緣強度 50Hz 1Minute 500V Min環境溫度 20+50溫 升 80 Max.徑向跳動 0.02mm Max.軸向跳動 0.1-0.3mm型號 相數 電流 電阻 最大靜轉矩 重量 外形尺寸(A) () (kg.cm) (kg) L0(mm) L1(mm) 35BYG310 2
15、0.19 60 0.8 0.15 28 2135BYG408 2 1.60 1.3 0.9 0.15 29 2135BYG409 2 0.32 23 1.4 0.20 29 21選擇步進電機的步距角為,絲杠導程為1.5,機器人行進的分辨率為0.0075/步9。工作體轉動所用步進電機的選擇。工作體在轉動過程中需要克服由重力所產生的轉矩,由于工作體形狀未知,故設工作體重心偏移量為最大,工作體質量為1.5,得出所需電機轉矩為 。選擇57BYG008型步進電機。步 距 角 1.8deg環境溫度 25+40 絕緣等級 B表2-2Form 2-2型號 電壓 電流 電阻 電感 最大靜力矩 機身長 轉動慣量
16、重量 (V) (A) () (mh) (N.cm) (mm) (g.cm2) (kg)57BYG007 12 0.38 32 30 29.4 41 60 0.4557BYG008 4.0 1.3 3.1 4.4 49.0 51 118 0.6 57BYG009 2.4 2.4 1.0 1.5 58.8 56 145 0.6522 推拉式電磁鐵的選擇本設計卡緊部分所采用的是推拉式電磁鐵,通過錐形塊來實現卡緊。錐形塊的錐度設定為,支撐桿受力簡圖如圖2-1所示:圖2-1支撐桿受力簡圖Diagram 2-1 prop up a pole to be subjected to a dint sketch
17、 plan圖中F1為電磁鐵推力,F2為作用在油管內壁的卡緊力。因為錐度為,所以F1=F2 。機器人前進所用推力為9.8N,則電磁鐵所產生的卡緊力應大于9.8N。在電磁鐵的卡緊足上鍍上用于增大摩擦力的橡膠,保守的取滑動摩擦系數為0.5,計算得出所需電磁鐵的推力為為19.6N。由于機器人工作的空間狹小且工作條件不清楚,所以在保證足夠力的前提下,應盡量選擇體積小行程適中的。所以電磁鐵選用TCT40Z型推拉式電磁鐵。仔細分析電磁鐵工作曲線(如圖2-2 )后,決定選用工作行程為4,功率50W。圖2-2Diagram2-23 關鍵件的校核31 絲杠的校核由于機器人前進過程中行進的距離要進行精確控制,屬于精
18、密傳動,所以絲杠材料選用CrWMn鋼 ,公稱直徑為8mm , H = 0.75mm , 導程為1.5 mm , 。 其中 絲杠推力F = 9.8N ,d2 = 7.25 , Z = 7 。計算得出:P = 0.08MP a, 所以符合要求10。32 軸承的校核本設計中兩處用到了軸承,其中轉動部分需要用角接觸球軸承70000型。本設計中此處選用角接觸球軸承既能抵消所受的徑向力,又能抵消所受的附加軸向力。又因為此對軸承所受的外摩擦力即軸向力非常小,故符合機器人的結構及壽命要求。另外固定絲杠時也需要選用軸承。由于絲杠是與電機布置在同一部分機體內,電機已經占據了一定空間,且絲杠公稱直徑很小,普通軸承不
19、能滿足要求。我們在這里選用儀器儀表軸承,d = 6mm ,D = 13mm 。軸承的基本額定載荷KN,KN。在輕載的情況下,軸向,即N11。在機器人行進過程中,絲杠的推力為9.8N,所以選用的軸承滿足要求。33 鍵的校核轉動部分使用了一個普通平鍵,傳遞轉矩為 0.375N.m ,軸的直徑為16mm,。 校核公式: 計算得出,鍵的材料為鋼,符合要求12。4 驅動系統設計步進電機是一種將脈沖信號轉換成相應的角位移或線位移的機電執行元件。每外加一個控制脈沖,電機就運行一步,故稱為步進電機或脈沖馬達。與其它驅動元件相比其控制有如下幾個明顯的優點:1) 通常不需要反饋就能對位移或速度進行精確控制;2) 輸出的轉角或位移精度高,誤差不會累積;3) 控制系統結構簡單,與數字設備兼容,價格便宜。步進電機的品種規格很多,按照其結構和工作原理可劃分為反應式電機、永磁式步進電機、混合式步進電機和特種步進電機四種主要形式。本次設計中采用混合式步進電機。步進電機的運行需要有一電子裝置進行驅動,這種裝置就是步進電機驅動器,它是把控制系統發出的脈沖信號轉化為角位移,既控制系統每發出一個脈沖信號,通過驅動
溫馨提示
- 1. 本站所有資源如無特殊說明,都需要本地電腦安裝OFFICE2007和PDF閱讀器。圖紙軟件為CAD,CAXA,PROE,UG,SolidWorks等.壓縮文件請下載最新的WinRAR軟件解壓。
- 2. 本站的文檔不包含任何第三方提供的附件圖紙等,如果需要附件,請聯系上傳者。文件的所有權益歸上傳用戶所有。
- 3. 本站RAR壓縮包中若帶圖紙,網頁內容里面會有圖紙預覽,若沒有圖紙預覽就沒有圖紙。
- 4. 未經權益所有人同意不得將文件中的內容挪作商業或盈利用途。
- 5. 人人文庫網僅提供信息存儲空間,僅對用戶上傳內容的表現方式做保護處理,對用戶上傳分享的文檔內容本身不做任何修改或編輯,并不能對任何下載內容負責。
- 6. 下載文件中如有侵權或不適當內容,請與我們聯系,我們立即糾正。
- 7. 本站不保證下載資源的準確性、安全性和完整性, 同時也不承擔用戶因使用這些下載資源對自己和他人造成任何形式的傷害或損失。
最新文檔
- 2025-2030中國重磷酸鋅涂層行業需求趨勢及發展規劃分析報告
- 2025-2030中國花生醬行業供需形勢與營銷策略分析報告
- 2025至2030植物蛋白成分行業項目調研及市場前景預測評估報告
- 2025-2030中國平臺拐杖行業市場發展趨勢與前景展望戰略研究報告
- 2025-2030中國學生運動服裝行業深度調研及投資前景預測研究報告
- 2025-2030中國墨西哥芝士醬行業市場發展趨勢與前景展望戰略研究報告
- 2025-2030中國316L不銹鋼行業市場現狀分析及競爭格局與投資發展研究報告
- 胎盤血腫的護理查房
- 水塘降水施工方案
- 垃圾焚燒審計方案(3篇)
- 黨課課件含講稿:《關于加強黨的作風建設論述摘編》輔導報告
- 國家開放大學行管專科《監督學》期末紙質考試總題庫2025春期版
- GB/T 3280-2015不銹鋼冷軋鋼板和鋼帶
- CNC數控車床操作指導書
- 管道施工主要質量保證措施及通病防治措施
- 失火罪消防責任事故罪消防刑事案件移送移交報告
- 斯巴達勇士賽
- 住院醫師規范化培訓臨床小講課指南(2021年版)
- T∕CQAP 2002-2022 基于水泡性口炎病毒載體的新型冠狀病毒核酸檢測用陽性假病毒質控品
- 1#球磨機襯板更換及方案
- 俄羅斯、中國、歐美電子管型號替代表
評論
0/150
提交評論