



版權說明:本文檔由用戶提供并上傳,收益歸屬內容提供方,若內容存在侵權,請進行舉報或認領
文檔簡介
1、南京航空航天大學南京航空航天大學Nanjing University of Aeronautics & Astronautics直升機技術研究所直升機技術研究所Institute of Helicopter Technology直升機空氣動力學直升機空氣動力學第四章第四章 前飛時旋翼槳葉的工作原理前飛時旋翼槳葉的工作原理1.1.旋翼和槳葉的相對氣流旋翼和槳葉的相對氣流2.2.槳葉的揮舞運動槳葉的揮舞運動3.3.槳葉的擺振運動槳葉的擺振運動4.4.槳葉的變距運動及旋翼操縱原理槳葉的變距運動及旋翼操縱原理南京航空航天大學南京航空航天大學Nanjing University of Aeronauti
2、cs & Astronautics直升機技術研究所直升機技術研究所Institute of Helicopter Technology直升機空氣動力學直升機空氣動力學旋翼處于斜流狀態:旋翼處于斜流狀態:槳盤迎角槳盤迎角 不等于不等于 旋翼構造軸系旋翼構造軸系OXOXs sY Ys sZ Zs s 在前行槳葉一側:在前行槳葉一側: 右旋旋翼:右旋旋翼: 指向右方指向右方 左旋旋翼:左旋旋翼: 指向左方指向左方 090sa aSZSZSZ南京航空航天大學南京航空航天大學Nanjing University of Aeronautics & Astronautics直升機技術研究所直升機技術研究所I
3、nstitute of Helicopter Technology直升機空氣動力學直升機空氣動力學第一節第一節 旋翼和槳葉的相對氣流旋翼和槳葉的相對氣流1-1 1-1 旋翼的相對氣流旋翼的相對氣流 平行于構造平面的速度系數平行于構造平面的速度系數,前進比前進比: 垂直于構造平面的速度系數,垂直于構造平面的速度系數,流入比流入比: 討論:各飛行狀態下旋翼構造迎角、前進比和入流比討論:各飛行狀態下旋翼構造迎角、前進比和入流比 (懸停飛行、垂直飛行、平飛)(懸停飛行、垂直飛行、平飛)0cossVRa am m= =W WRVssin00南京航空航天大學南京航空航天大學Nanjing Universi
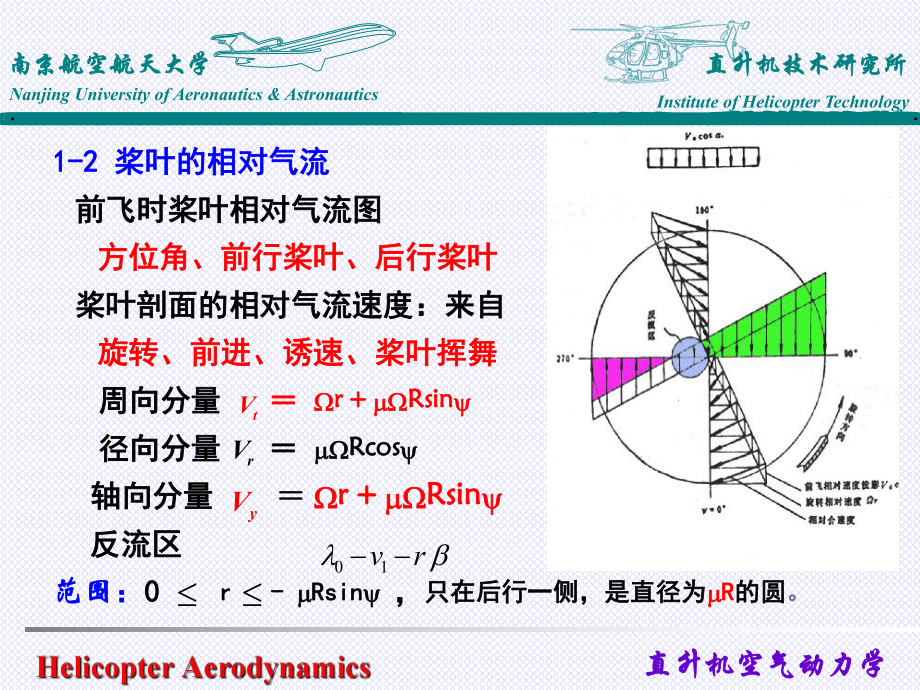
4、ty of Aeronautics & Astronautics直升機技術研究所直升機技術研究所Institute of Helicopter Technology直升機空氣動力學直升機空氣動力學1-2 1-2 槳葉的相對氣流槳葉的相對氣流 前飛時槳葉相對氣流圖前飛時槳葉相對氣流圖 方位角、前行槳葉、后行槳葉方位角、前行槳葉、后行槳葉 槳葉剖面的相對氣流速度:來自槳葉剖面的相對氣流速度:來自 旋轉、前進、誘速、槳葉揮舞旋轉、前進、誘速、槳葉揮舞周向分量周向分量 r + r + R Rsinsin 徑向分量徑向分量 R Rcoscos 軸向分量軸向分量 r + r + R Rsinsin 反流區
5、反流區范圍范圍:0 0 r r - - R Rsinsin ,只在后行一側,是直徑為只在后行一側,是直徑為 R R的圓的圓。tVyVrV01vr南京航空航天大學南京航空航天大學Nanjing University of Aeronautics & Astronautics直升機技術研究所直升機技術研究所Institute of Helicopter Technology直升機空氣動力學直升機空氣動力學 第二節第二節 槳葉的吹風揮舞運動槳葉的吹風揮舞運動 2-1 2-1 揮舞鉸揮舞鉸容許槳葉上下揮舞容許槳葉上下揮舞 氣流不對稱氣流不對稱 槳葉升力不對稱槳葉升力不對稱 形成側翻力矩及根部大彎矩形成
6、側翻力矩及根部大彎矩 設置設置揮舞鉸揮舞鉸 槳葉隨升力增減而槳葉隨升力增減而 上下揮舞上下揮舞速度速度 使剖面迎角變化使剖面迎角變化 槳葉升力趨于均衡槳葉升力趨于均衡消除了消除了側翻力矩側翻力矩 揮舞鉸處彎矩為揮舞鉸處彎矩為0 。 揮舞引起槳葉剖面的迎角改變:揮舞引起槳葉剖面的迎角改變:r trV南京航空航天大學南京航空航天大學Nanjing University of Aeronautics & Astronautics直升機技術研究所直升機技術研究所Institute of Helicopter Technology直升機空氣動力學直升機空氣動力學 2-2 2-2 揮舞運動方程揮舞運動方程
7、計入揮舞慣性力,寫出力矩平衡方程:計入揮舞慣性力,寫出力矩平衡方程:式中:式中: 離心力力矩離心力力矩 揮舞慣性力矩揮舞慣性力矩 重力力矩重力力矩 很小且是常數,不計;升力力矩暫不詳列,得:很小且是常數,不計;升力力矩暫不詳列,得:0TGLXMMMMb b+ + + += =22020RLXyeRyeMmdrr rIImr drb bb b= = - -W W = = - -W W= = 022222RyeMmdr rrIdddtdb bb bb bb bb bb by y= = - -鬃鬃= = - -= = = W W 222yedMIdb bb by y= = - - W WGM ty
8、y= = W W南京航空航天大學南京航空航天大學Nanjing University of Aeronautics & Astronautics直升機技術研究所直升機技術研究所Institute of Helicopter Technology直升機空氣動力學直升機空氣動力學 或或與質量與質量-彈簧彈簧-阻尼系統方程相對比阻尼系統方程相對比 可得出結論:可得出結論:1, 1,揮舞運動是典型的周期性振動揮舞運動是典型的周期性振動激振力矩是空氣動力力矩,離心力矩激振力矩是空氣動力力矩,離心力矩是恢復力矩是恢復力矩,阻尼力矩含在氣動力矩中阻尼力矩含在氣動力矩中。方程的解可寫為方程的解可寫為 高階項量
9、值很小,可只取到一階為止。高階項量值很小,可只取到一階為止。2221TyedMdIb bb by y+ += =W WcKxxxFmm+ + += = 2221TyedMdtIb bb b+ + W W= =010102020cossincos2sin2aababb by yy yy yy y= =- - - - -南京航空航天大學南京航空航天大學Nanjing University of Aeronautics & Astronautics直升機技術研究所直升機技術研究所Institute of Helicopter Technology直升機空氣動力學直升機空氣動力學2揮舞固有頻率正是旋翼
10、的旋轉角頻率揮舞固有頻率正是旋翼的旋轉角頻率,因而一階揮舞是,因而一階揮舞是 對于一階空氣動力諧波的對于一階空氣動力諧波的共振共振(因阻尼很大,不發散)。(因阻尼很大,不發散)。3 3 揮舞運動消除了旋翼傾翻力矩揮舞運動消除了旋翼傾翻力矩 將揮舞角表達式將揮舞角表達式 代入揮舞運動方程,代入揮舞運動方程, 得得 對比對比 得得 此式表明此式表明,槳葉的升力力矩不隨方位角變化槳葉的升力力矩不隨方位角變化,旋轉中保持常值。,旋轉中保持常值。揮舞運動自動消除了氣流不對稱引起的旋翼側傾力矩。揮舞運動自動消除了氣流不對稱引起的旋翼側傾力矩。 討論:氣動力矩是常值,怎么會是激振力?討論:氣動力矩是常值,怎
11、么會是激振力?dadt22202 TyeMaI20 aab01010cossin TyedMdtI2221 南京航空航天大學南京航空航天大學Nanjing University of Aeronautics & Astronautics直升機技術研究所直升機技術研究所Institute of Helicopter Technology直升機空氣動力學直升機空氣動力學 2-3 2-3 揮舞運動的幾何圖象揮舞運動的幾何圖象 揮舞角表達式中揮舞角表達式中 錐度角錐度角 是常數項,與方位角無關,是常數項,與方位角無關,表示各片槳葉向上抬起相同表示各片槳葉向上抬起相同的角度,形成倒錐軌跡,稱為的角度,形
12、成倒錐軌跡,稱為 旋翼錐體。旋翼錐體。0a0a0aaab01010cossin 南京航空航天大學南京航空航天大學Nanjing University of Aeronautics & Astronautics直升機技術研究所直升機技術研究所Institute of Helicopter Technology直升機空氣動力學直升機空氣動力學 后倒角后倒角 和側傾角和側傾角 令:令: 表示槳葉在不同方位角處的揮舞角變化,表示槳葉在不同方位角處的揮舞角變化, 也代表旋錐體傾斜量:也代表旋錐體傾斜量: 各槳葉在方位各槳葉在方位 處都抬高處都抬高 度,在度,在 處都下垂處都下垂 度,度,表明旋翼錐體向后
13、傾倒了表明旋翼錐體向后傾倒了 角。角。 稱為旋翼稱為旋翼后倒角后倒角。同理,槳葉在方位同理,槳葉在方位 處處下垂了下垂了 ,在,在 處上臺處上臺了了 , 稱為稱為側傾角側傾角。01800010a10baab01010cossin 10a10a10a10a10b090027010b10b南京航空航天大學南京航空航天大學Nanjing University of Aeronautics & Astronautics直升機技術研究所直升機技術研究所Institute of Helicopter Technology直升機空氣動力學直升機空氣動力學 2-4 2-4 揮舞系數的物理意義揮舞系數的物理意義
14、錐度角錐度角 取決于槳葉升力、重力和離心力各力矩中的常量部分的平取決于槳葉升力、重力和離心力各力矩中的常量部分的平衡。衡。軸流狀態如懸停時無斜吹風,軸流狀態如懸停時無斜吹風, 后倒角后倒角 旋轉平面內周向氣流旋轉平面內周向氣流 r + Rsin 左右不對稱引起的揮舞。左右不對稱引起的揮舞。 揮舞相對速度形成迎角補償揮舞相對速度形成迎角補償 與氣流速度相結合,使升力力矩保持不變。與氣流速度相結合,使升力力矩保持不變。 tVarctanTrV01010cossinaab0a10a0a南京航空航天大學南京航空航天大學Nanjing University of Aeronautics & Astron
15、autics直升機技術研究所直升機技術研究所Institute of Helicopter Technology直升機空氣動力學直升機空氣動力學 側傾角側傾角 錐度角錐度角 以及以及旋翼誘導速度旋翼誘導速度 分布分布前小后大,前小后大,引引起起 前后槳葉的剖面迎角不對稱,前后槳葉的剖面迎角不對稱,造成旋翼錐體向造成旋翼錐體向方位角方位角 一側傾倒一側傾倒 度。度。1v10b10a09010b南京航空航天大學南京航空航天大學Nanjing University of Aeronautics & Astronautics直升機技術研究所直升機技術研究所Institute of Helicopter
16、 Technology直升機空氣動力學直升機空氣動力學 討論:討論:吹風揮舞的相位吹風揮舞的相位旋翼槳盤處旋翼槳盤處 流速流速左右左右不對稱,不對稱, 引起旋翼縱向揮舞引起旋翼縱向揮舞-后倒角后倒角剖面迎角剖面迎角前后前后不對稱,不對稱, 引起旋翼橫向揮舞引起旋翼橫向揮舞-側傾角側傾角如何理解這種如何理解這種 的的相位差相位差?10a10b090南京航空航天大學南京航空航天大學Nanjing University of Aeronautics & Astronautics直升機技術研究所直升機技術研究所Institute of Helicopter Technology直升機空氣動力學直升機空
17、氣動力學第三節第三節 槳葉的擺振運動槳葉的擺振運動 槳葉上下揮舞時,其槳葉上下揮舞時,其質心至旋轉中心的距離質心至旋轉中心的距離周期性周期性改變,會在旋轉平面內產生科氏力,在槳根引起很大的改變,會在旋轉平面內產生科氏力,在槳根引起很大的交變彎矩。交變彎矩。 在槳根設置在槳根設置擺振鉸擺振鉸,容許槳葉在科氏力作用下前后,容許槳葉在科氏力作用下前后擺振,消除了交變彎矩。擺振,消除了交變彎矩。rGGddVrrdtdt(cos )sin yegsrGFVg2 南京航空航天大學南京航空航天大學Nanjing University of Aeronautics & Astronautics直升機技術研究所
18、直升機技術研究所Institute of Helicopter Technology直升機空氣動力學直升機空氣動力學 擺振運動方程:擺振運動方程: 討論:擺振鉸能否設置在旋翼中心?討論:擺振鉸能否設置在旋翼中心?eef011cossin yegsGyeGGdFrgdtGabra aa ba bg222110 10 11 12sin2(sincossin2cos2 )2 南京航空航天大學南京航空航天大學Nanjing University of Aeronautics & Astronautics直升機技術研究所直升機技術研究所Institute of Helicopter Technology
19、直升機空氣動力學直升機空氣動力學 第四節第四節 槳葉的變距運動槳葉的變距運動通過自動傾斜器和變距鉸,使旋翼槳葉槳距通過自動傾斜器和變距鉸,使旋翼槳葉槳距周期改變:周期改變:槳葉的升力隨之改變槳葉的升力隨之改變。 4-1 4-1 直升機的飛行操縱直升機的飛行操縱 升降升降-操縱旋翼總槳距操縱旋翼總槳距 , 改變拉力大小改變拉力大小 前后左右飛前后左右飛操縱槳葉周期變距操縱槳葉周期變距 和和 , 改變旋翼錐體(拉力)傾斜方向和角度改變旋翼錐體(拉力)傾斜方向和角度 航向航向-操縱尾槳總距,改變尾槳拉力值操縱尾槳總距,改變尾槳拉力值012012sincos南京航空航天大學南京航空航天大學Nanjin
20、g University of Aeronautics & Astronautics直升機技術研究所直升機技術研究所Institute of Helicopter Technology直升機空氣動力學直升機空氣動力學 4 -2 變距與揮舞等效變距與揮舞等效 變距引起周期揮舞,使旋翼錐體傾斜。變距引起周期揮舞,使旋翼錐體傾斜。 周期變距改變了槳葉原先的升力,引起新的揮舞運動。周期變距改變了槳葉原先的升力,引起新的揮舞運動。 槳葉將在一個新的軌跡面上穩定旋轉,相對該平面不再有槳葉將在一個新的軌跡面上穩定旋轉,相對該平面不再有周期變距,即新的槳尖軌跡平面與操縱平面平行:周期變距,即新的槳尖軌跡平面與
21、操縱平面平行: 周期變距操縱引起同等大小的揮舞周期變距操縱引起同等大小的揮舞-變距與揮舞等效。變距與揮舞等效。 周期變距操縱周期變距操縱 引起的揮舞角響應,比操縱輸入滯后引起的揮舞角響應,比操縱輸入滯后 : 引起的揮舞為引起的揮舞為前飛時,依靠前飛時,依靠操縱揮舞操縱揮舞克服吹風揮舞,并使旋翼錐體(拉力)克服吹風揮舞,并使旋翼錐體(拉力)向所需要的方向傾斜,合成的揮舞角是:向所需要的方向傾斜,合成的揮舞角是: 09012sincos 12cossin 1s1011s102aabb南京航空航天大學南京航空航天大學Nanjing University of Aeronautics & Astron
22、autics直升機技術研究所直升機技術研究所Institute of Helicopter Technology直升機空氣動力學直升機空氣動力學 第五節第五節 偏置鉸旋翼和無鉸旋翼偏置鉸旋翼和無鉸旋翼 5-1 偏置鉸旋翼偏置鉸旋翼 為便于結構布置及增大槳轂力矩,揮舞鉸不在旋轉中心,而為便于結構布置及增大槳轂力矩,揮舞鉸不在旋轉中心,而是有偏置量是有偏置量 。計算揮舞力矩時對揮舞鉸(不是對旋轉中心)。計算揮舞力矩時對揮舞鉸(不是對旋轉中心)取矩,揮舞方程變為取矩,揮舞方程變為 式中式中 ,多在多在(3-5)% 偏置鉸旋翼的揮舞固有頻率略高于旋轉角頻率偏置鉸旋翼的揮舞固有頻率略高于旋轉角頻率 ,對
23、于吹風,對于吹風及操縱的響應不再恰好是共振,滯后略小于及操縱的響應不再恰好是共振,滯后略小于 。 對旋翼的空氣動力特性無顯著影響,但會產生對旋翼的空氣動力特性無顯著影響,但會產生槳轂力矩,槳轂力矩,對直升機的平衡及操縱性與穩定性有重要作用。對直升機的平衡及操縱性與穩定性有重要作用。TyeMIdd2221)1 (/ l R090南京航空航天大學南京航空航天大學Nanjing University of Aeronautics & Astronautics直升機技術研究所直升機技術研究所Institute of Helicopter Technology直升機空氣動力學直升機空氣動力學5-2 無鉸
24、式旋翼無鉸式旋翼 無揮舞鉸,槳葉以無揮舞鉸,槳葉以自身的柔性自身的柔性或槳轂中的或槳轂中的柔性元件柔性元件實實現揮舞運動。現揮舞運動。 槳轂結構及維護工作大為簡化,改善了旋翼性能。槳轂結構及維護工作大為簡化,改善了旋翼性能。 數學分析方法:把無鉸式旋翼當作有數學分析方法:把無鉸式旋翼當作有偏置量、有約束偏置量、有約束剛度剛度(扭簧)的有鉸式旋翼。(扭簧)的有鉸式旋翼。南京航空航天大學南京航空航天大學Nanjing University of Aeronautics & Astronautics直升機技術研究所直升機技術研究所Institute of Helicopter Technology直升機空氣動力學直升機空氣動力學 小小 結結1 1,旋翼在斜流中運轉,造成槳葉,旋翼在斜流中運轉,造成槳葉氣流及迎角不對稱。氣流及迎角不對稱。2 2,為消除傾翻力矩,設置揮舞鉸,旋翼產生,為消除傾翻力矩,設置
溫馨提示
- 1. 本站所有資源如無特殊說明,都需要本地電腦安裝OFFICE2007和PDF閱讀器。圖紙軟件為CAD,CAXA,PROE,UG,SolidWorks等.壓縮文件請下載最新的WinRAR軟件解壓。
- 2. 本站的文檔不包含任何第三方提供的附件圖紙等,如果需要附件,請聯系上傳者。文件的所有權益歸上傳用戶所有。
- 3. 本站RAR壓縮包中若帶圖紙,網頁內容里面會有圖紙預覽,若沒有圖紙預覽就沒有圖紙。
- 4. 未經權益所有人同意不得將文件中的內容挪作商業或盈利用途。
- 5. 人人文庫網僅提供信息存儲空間,僅對用戶上傳內容的表現方式做保護處理,對用戶上傳分享的文檔內容本身不做任何修改或編輯,并不能對任何下載內容負責。
- 6. 下載文件中如有侵權或不適當內容,請與我們聯系,我們立即糾正。
- 7. 本站不保證下載資源的準確性、安全性和完整性, 同時也不承擔用戶因使用這些下載資源對自己和他人造成任何形式的傷害或損失。
最新文檔
- 2025年壓瘡護理新進展
- 客戶開發工作總結案例
- 電梯安全培訓
- 兒童財商教育課件
- 內科護理10分鐘小講課
- 倉儲物流中心廠房出租與倉儲服務外包協議
- 心梗老人的護理
- 知識產權采購合同范本:電子元器件行業
- 創新型企業廠房物業管理及創新解決方案合同范本
- 物業服務企業人力資源配置合同
- 湘教版七年級數學下冊期末考試卷(含答案與解析)
- 2025年離婚協議書版本
- 店鋪轉讓合同協議書模板
- 2025遼寧中考:歷史必考知識點
- 農村電商賦能鄉村振興培訓課程大綱
- 2025屆重慶康德三診英語+答案
- 耳石癥教學課件
- 玻璃吊裝施工專項施工方案
- 探尋河北省競技體育可持續發展的社會資源密碼:現狀、挑戰與破局之策
- 焊接安全知識考核試題及答案
- 2025燃氣電廠智能巡檢系統技術方案
評論
0/150
提交評論