



版權說明:本文檔由用戶提供并上傳,收益歸屬內(nèi)容提供方,若內(nèi)容存在侵權,請進行舉報或認領
文檔簡介
1、經(jīng)典控制系統(tǒng)隨動控制系統(tǒng)設計1,概述控制技術的發(fā)展使隨動系統(tǒng)廣泛地應用于軍事工業(yè)和民用工業(yè),隨動系統(tǒng)是一種帶反饋控制的動態(tài)系統(tǒng)。在這種系統(tǒng)中輸出量一般是機械量,例如:位移,速度或者加速度等等。反饋裝置將輸出量變換成與輸入量相同的信號,然后進行比較得出偏差。系統(tǒng)是按照偏差的性質(zhì)進行控制的,控制的結果是減少或消除偏差,使系統(tǒng)的輸出量準確地跟蹤或復現(xiàn)輸入量的變化。系統(tǒng)中的給定量和被控制量一樣都是位移(或代表位移的電量),可以是角位移,也可以是直線位移。根據(jù)位置給定信號和位置反饋反饋信號以及兩個信號的綜合比較來分類,可分成模擬式隨動系統(tǒng)和數(shù)字式隨動系統(tǒng)。由于隨動系統(tǒng)的輸出量是一種機械量,故其輸出常常以
2、機械軸的運動形式表示出來。該機械軸稱為輸出軸。通常輸出軸帶動較大的機械負荷而運動,在隨動系統(tǒng)中,如果被控量是機械位置或其導數(shù)時,這類系統(tǒng)稱之為伺服系統(tǒng)。位置隨動系統(tǒng)的應用例子如:(1)機械加工過程中機床的定位控制和加工軌跡控制是位置隨動系統(tǒng)的典型實例(2)冶金工業(yè)中 軋剛機壓下裝置以及其它輔助設備的控制 在軋制鋼材的過程中,必須使上、下軋輥之間的距離能按工藝要求自動調(diào)整;焊接有縫鋼管或鋼板;要求焊機頭能準確地對正焊縫的控制。(3)儀表工業(yè)中各種記錄儀的筆架控制,如溫度記錄儀、計算機外部設備中的x-y記錄儀,各種繪圖機以及計算機磁盤驅動器的磁頭定位控制。(4)制造大規(guī)模集成電路所需要的制圖機、分
3、布重復照相機和光刻機,機器人或機械手的動作控制等。(5)火炮群跟蹤雷達天線或電子望遠鏡瞄準目標的控制:艦船上的自動探艙裝置使位于船體尾部的艙葉的偏角模仿復制位于駕駛室的操作手輪的偏轉角,以便按照航向要求來操縱船舶的航向:陀螺儀慣性導航系統(tǒng),各類飛行器的姿態(tài)控制等,也都是位置隨動系統(tǒng)的具體應用。2結構原理位置隨動系統(tǒng)是一種位置反饋控制系統(tǒng),因此,一定具有位置指令和位置反饋的檢測裝置,通過位置指令裝置將希望的位移轉換成具有一定精度的電量,利用位置反饋裝置隨時檢測得到的偏差信號放大以后,控制執(zhí)行電機向消除偏差的方向旋轉,直到達到一定的精度為止。這樣被控制機械的實際位置就能跟隨指令變化,構成一個位置隨
4、動系統(tǒng)。原理框圖可描述如圖1所示。因為控制存在慣性,當輸入X(t)變化時,輸出Y(t)難以立即復現(xiàn),此時Y(t)X(t),即:e(t)= Y(t)-X(t)0,測量元件將偏差e(t)轉換成電壓輸出經(jīng)小信號放大器放大,功率放大器執(zhí)行電機轉動減速器使被控對象朝著消極誤差的方向轉動,只要X(t)Y(t),就有e(t)0,執(zhí)行電機就會轉動,一直到偏差e(t)=0,執(zhí)行電機停止轉動,此時系統(tǒng)實現(xiàn)了輸出Y(t)對輸入量X(t)的復現(xiàn)。當X(t)隨時間變化時,Y(t)就跟著X(t)作同樣變化,這種現(xiàn)象就稱為隨動。 圖1 位置隨動控制系統(tǒng)原理框圖隨著機電產(chǎn)品及電子元件的不斷發(fā)展與完善,圖1中各個環(huán)節(jié)均可采用多
5、種不同的元器件來實現(xiàn)。組成系統(tǒng)的元部件按職能分類主要有以下幾種。測量元件:是用來檢測被控制的物理量,如果這個物理量是非電量,一般要轉換為電量,如電位器、旋轉變壓器或自整角機用于檢測角度轉換成電壓;測速發(fā)電機用于檢測電動機的速度轉換為電壓。而光電編碼器作為位置與角度的檢測元件應用在計算機位置控制系統(tǒng)及計算機速度控制系統(tǒng)中。放大元件:其職能是將偏差信號進行放大,用來推動執(zhí)行電機去控制被控對象。可用晶體管、晶閘管、集成電路等組成的電壓放大級和功率放大級將偏差信號放大。執(zhí)行元件:其職能是直接推動被控對象,使其被控量發(fā)生變化。用來作為執(zhí)行元件的有電動機等。減速器:其職能是實現(xiàn)執(zhí)行元件與負載之間的匹配 由
6、于執(zhí)行元件常為高轉速、小轉矩的電動機,而負載通常均為低轉速、大轉矩,所以在執(zhí)行元件到負載之間需要引入減速器以達到兩者之間的匹配,減速器通常為一齒輪組。典型的隨動系統(tǒng)框圖如圖2所示圖2 典型的隨動系統(tǒng)框圖3 各部件結構與數(shù)學模型一、測量元件 測量元件的種類:電位器、自整角機、旋轉變壓器、光柵、多極、感應同步器、光電碼盤等。(1)伺服電位器最常用的伺服電位器是接觸式電阻變換器,或稱為電阻式位移變換器,它是在輸入位移的作用下,改變接入電路中的固定電阻,即改變其電阻值的大小。實際測量中通常將兩個電位器并聯(lián)構成橋式電路,用以測量系統(tǒng)位移 圖3 用電位器測量系統(tǒng)位移誤差誤差的大小,如圖3所示。電位器的滑動
7、端固定在轉軸上,其中,和指令軸相聯(lián)的稱為接收電位器RPR。兩滑動端之間的電壓Urp與輸入位移 輸出位移之差成正比 供電電壓Us可為直流 也可以是交流 視具體情況確定 電位器用于測量角位移時是轉動式的 當用于測量直線位移時則采用直線位移式。 伺服電位器作位置檢測元件線路簡單,慣性小,消耗功率小,所需電源簡單,且價格便宜,使用方便。缺點是位移范圍有限,測量精度不高,容易磨損而造成接觸不良,且壽命短。所以,一般電位器只適用于測量精度要求不高、位移范圍的系統(tǒng)中。(1) 控制式自整角機 自整角機或旋轉變壓器作為隨動系統(tǒng)的測量元件,通常是成對使用的。控制式自整角機工作原理如圖4圖4 自整角機 圖5 旋轉變
8、壓器圖4中左邊為自整角機發(fā)送機,右邊為自整角機接收機。發(fā)送機的轉子繞組接交流激磁電壓Uj,稱激磁繞組。接收機的轉子繞組輸出電壓,稱為輸出繞組。發(fā)送機激磁繞組對定子D1相得夾角用表示,接收機輸出繞組對定子D1相得夾角用2表示。就是發(fā)送機、接收激磁繞組軸線的夾角差值。經(jīng)指導后可得出繞組中產(chǎn)生的感應電勢的有效值: E2=E2max cos 式中= 通常把= 90°的位置作為協(xié)調(diào)位置,偏離此位置的角度為失調(diào)角,即=90°-,故:E2=E2max cos= E2max sin 當接收機輸出繞組接上交流放大器時,可認為輸出繞組電壓U2=U2maxsin 在角很小時sin=U2=U2ma
9、x (3)旋轉變壓器旋轉變壓器如圖5所示。其原理和自整角機類似,一般來說角差的轉換精度比自整角機高。二、交流放大器 交流放大器是由基本運算放大器和反饋網(wǎng)絡等組成,因由電容的隔離作用,可降低漂移及噪聲。交流放大器的線路圖如圖6。其中的電容C起隔直作用。穩(wěn)壓管用來限制輸出信號,主要目的是為了保護交放電路。 交流放大器的放大倍數(shù)為: 交流放大器的放大倍數(shù)是確定的,為使系統(tǒng)工作于線性區(qū),應使輸入電壓較小。 圖6 交流放大器三、調(diào)解環(huán)節(jié) 在隨動系統(tǒng)中,誤差敏感元件的輸出信號是交流信號,而我們以前分析研究的校正網(wǎng)絡指在直流情況下進行的,所以在系統(tǒng)中必須引入一個交流信號變?yōu)橹绷餍盘柕沫h(huán)節(jié)解調(diào)環(huán)節(jié)。線路圖如圖
10、7所示。晶體管對接是為了減少殘余電壓:飽和時抵消飽和壓降,截止時抵消反向電流。晶體管作為開關截止時斷開、飽和時導通。型濾波電路用于減少輸出的脈動成分。 工作原理: Vbe反偏,截止,Usr不能通過。Ut上負下正,Vbe正偏,又因為Usr<<Ut,集電極正偏,飽和導通,相當于接的開關,Usr通過。 圖7 解調(diào)環(huán)節(jié) 對輸入信號和解調(diào)信號的要求:a)輸入信號和解調(diào)信號同頻率:b)相位差0°或180°。當同相時,輸出電壓為正半周,直流電壓的極性為正,當反向時,輸出電壓為負半周,直流電壓的極性為負。 從輸入端看進去,解調(diào)環(huán)節(jié)的等效電路如圖8所示。其中,R2為后級電路的等效
11、輸入阻抗。由等效電路可得解調(diào)濾波環(huán)節(jié)的傳遞函數(shù)為: 其中,可見,它是一個一階段性環(huán)節(jié)。解調(diào)濾波電路的形式很多,可以用類似的方法求出它們對應的傳遞函數(shù)。 圖8 解調(diào)環(huán)節(jié)的等效電路四、脈寬調(diào)制脈寬調(diào)制(PWM)變換器是一個電壓一脈沖變換裝置,其輸出的PWM波形信號經(jīng)過功率放大便可以驅動直流電機,實現(xiàn)調(diào)速控制。線路圖如圖9。為三角波發(fā)生器輸出圖如圖10所示。 圖9 脈寬調(diào)制Us=0,Usc的正負半波脈寬相等,輸出平均電壓為零,參見圖10 (a)。此信號經(jīng)功率放大后電機不會轉。Us>0,Usc的正半波寬度>負半波寬度,參見圖10(b)。此信號經(jīng)功率放大后電機正轉。Us<0,Usc的正
12、半波寬度<負半波寬度,參見圖10(c)。此信號經(jīng)功率放大后電機反轉。Usc的脈沖寬度正比于Us,實現(xiàn)了電壓脈沖的轉換。在三角波不包含直流成分時,輸出的線性度非常高。采用PWM控制電機的速度的隨動系統(tǒng)中,由于開關頻率高,靠電樞的濾波作用,可消除脈沖交流對直流電機的影響。其開頻率f關應高于調(diào)速系統(tǒng)的最高工作頻率(通頻帶)fc,一般希望f>10 fc,同事還應當高于系統(tǒng)中所有回路的諧振頻率,以防引起共振,供其上限受晶體管開關損耗和開關時間的限制,一般選2000Hz左右。 圖10 脈寬調(diào)制的波形 五、直流放大器和功率放大器 直流放大器是為了滿足靜態(tài)及動態(tài)的性能指標,需要改變系統(tǒng)增益系數(shù)K而
13、設定的。 直流放大器由基本運放電路和反饋網(wǎng)絡組成,且增益系數(shù)可調(diào),在線性工作區(qū)可將其看作一比例環(huán)節(jié)。 功率放大器在線性工作區(qū)同樣是一比例環(huán)節(jié)。六、執(zhí)行電機 執(zhí)行電機有很多種,應根據(jù)系統(tǒng)類型、功率、外形等要求進行合理選擇。圖11是直流電機的原理圖。 La很小,可以忽略,電機的傳遞函數(shù)為:圖11 控制電樞式直流電機 式中:為電機轉速,Km是電機增益常數(shù),Tm是電機時間常數(shù)。 若以角度為輸出,電機方框圖為: 圖12 電機方框圖 七、校正環(huán)節(jié) (1)串聯(lián)超前校正 超前校正,圖13左邊為無源校正網(wǎng)絡,右邊為有源校正網(wǎng)絡。 圖13 超前校正網(wǎng)絡 對有源校正,其傳遞函數(shù)為: 對無源網(wǎng)絡,其傳遞函數(shù)為: ,其
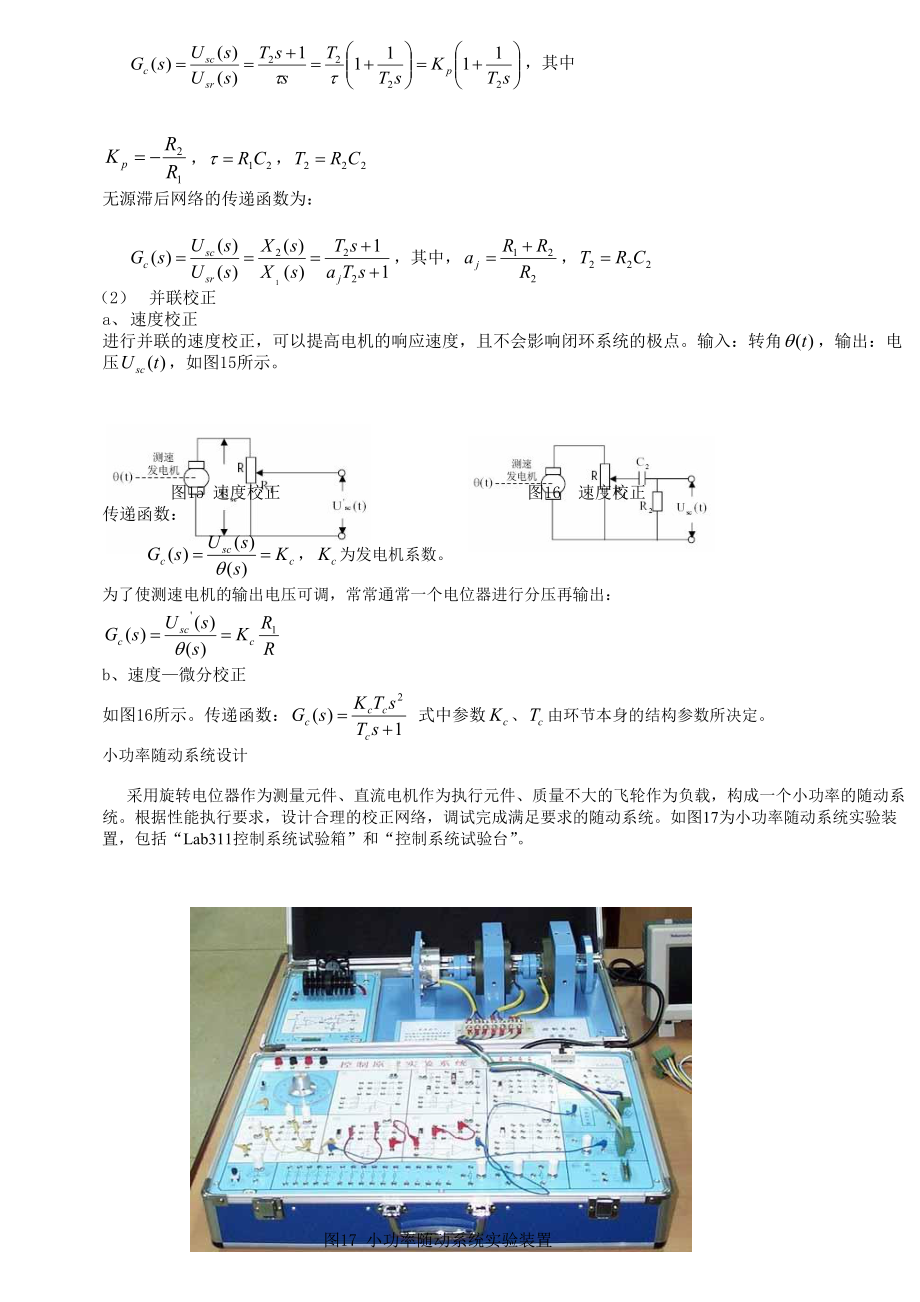
14、中, (2)串聯(lián)滯后校正 滯后校正,圖14左邊為無源校正網(wǎng)絡,右邊為有源校正網(wǎng)絡。 圖14 超前校正網(wǎng)絡 有源滯后網(wǎng)絡的傳遞函數(shù)為: ,其中 , 無源滯后網(wǎng)絡的傳遞函數(shù)為: ,其中,(2) 并聯(lián)校正a、 速度校正進行并聯(lián)的速度校正,可以提高電機的響應速度,且不會影響閉環(huán)系統(tǒng)的極點。輸入:轉角,輸出:電壓,如圖15所示。 圖15 速度校正 圖16 速度校正傳遞函數(shù): ,為發(fā)電機系數(shù)。為了使測速電機的輸出電壓可調(diào),常常通常一個電位器進行分壓再輸出:b、速度微分校正如圖16所示。傳遞函數(shù): 式中參數(shù)、由環(huán)節(jié)本身的結構參數(shù)所決定。小功率隨動系統(tǒng)設計 采用旋轉電位器作為測量元件、直流電機作為執(zhí)行元件、質(zhì)
15、量不大的飛輪作為負載,構成一個小功率的隨動系統(tǒng)。根據(jù)性能執(zhí)行要求,設計合理的校正網(wǎng)絡,調(diào)試完成滿足要求的隨動系統(tǒng)。如圖17為小功率隨動系統(tǒng)實驗裝置,包括“Lab311控制系統(tǒng)試驗箱”和“控制系統(tǒng)試驗臺”。圖17 小功率隨動系統(tǒng)實驗裝置一、 設計任務與要求1、 根據(jù)給定的元、部件和有關裝置,設計一套閉環(huán)控制的角度隨動系統(tǒng)。2、 對系統(tǒng)的有關參數(shù)進行測試。3、 設計出合理的校正網(wǎng)絡,在系統(tǒng)中加以實現(xiàn),使得校正后的系統(tǒng)滿足,,并具有較大的靜剛度和工作范圍。4、 寫出詳細的技術報告,包括以下內(nèi)容:a、主要任務;b、設計構思,元、部件使用,電路、系統(tǒng)工作原理;c、參數(shù)測定與處理;d、開環(huán)傳遞函數(shù)的確定,
16、校正方法及實現(xiàn);e、校正前后系統(tǒng)性能的理論分析;f、心得體會及遺留問題。二、 元、部件的技術性能與參數(shù)測定1、 WDD35精密導電塑料電位器WDD35系列電位器具備連續(xù)旋轉功能,常在顯示記錄儀表中使用,其滑動端與導電塑料接觸,實現(xiàn)角度電壓的交換。如圖18為WDD35D1型電位器外形。 圖18 WDD35D-1型電位器旋轉電位器在隨動系統(tǒng)中完成角度電壓變換,是一個比例環(huán)節(jié),其系數(shù)可由測得的旋轉角度輸出電壓擬合曲線的斜率求出。 表5-1 WDD35D-1型電位器主要技術指標標準阻值(K)1啟動力矩(mN.m)電阻公差(%)±15介質(zhì)耐壓(V)500(AC.RMS)min獨立線性度(%)0
17、.5絕緣電阻()1000(500VDC)理論電旋轉角345旋轉負荷壽命 (圈)50×10每隔15min反轉)輸出平滑性變化50%(對標準值)獨立線性度變化50%(對標準值)分辨力理論上無限輸出平滑性(%)額定功耗2W at 700W at 125 電阻溫度系數(shù)/)耐濕90%RH240h,電阻變化工作溫度系數(shù)- 55-+125()振動振幅1.52mm或加速度15g,頻率10-200HZ,電阻變化機械轉角360(連續(xù))沖擊50g11ms 電阻變化2、 直流力矩電機執(zhí)行部件為SYL-5永磁式直流電動機,連續(xù)堵轉力矩,連續(xù)堵轉電流1.8A,連續(xù)堵轉電壓,空載轉速=500r/min,靜摩擦力矩
18、0.098N·m。確定方法:用頻率特性測試儀獲得電機的副頻曲線,進行直線擬合,轉折頻率即為1/。的確定方法:用轉速表測得轉速n與的關系,則=n/,為測量準確,應選擇不同的進行多次測量,取平均值。關于實驗臺中的飛輪負載,可以與電機連接在一起,看成一個整體,進行上述參數(shù)的測量。3、 測速電機 測速元件為CYD-1永磁式直流測速發(fā)電機, =0.1v/r·min,。 測速電機作為測速元件工作在發(fā)電機狀態(tài),與電機輸出軸進行機械相聯(lián),它的時間常數(shù)必須很小,這樣其慣量對被測系統(tǒng)的影響可以忽略可以忽略不計,因此測速電機也可以看作一個比例環(huán)節(jié)。其比例系數(shù)可由測得的旋轉速度一輸出電壓擬合曲線的斜率求出。 在計算過程中,需注意所有的參數(shù)和系數(shù)都有各自的單位。為了不發(fā)生錯誤,相關的參數(shù)應采用一致的度量。在這里,角位移用弧度表示,時間用秒表示,因而轉速的單位“轉/分”應化為“弧度/秒”。三、 系統(tǒng)框圖 小功率隨動系統(tǒng)的結構框圖如圖19所示
溫馨提示
- 1. 本站所有資源如無特殊說明,都需要本地電腦安裝OFFICE2007和PDF閱讀器。圖紙軟件為CAD,CAXA,PROE,UG,SolidWorks等.壓縮文件請下載最新的WinRAR軟件解壓。
- 2. 本站的文檔不包含任何第三方提供的附件圖紙等,如果需要附件,請聯(lián)系上傳者。文件的所有權益歸上傳用戶所有。
- 3. 本站RAR壓縮包中若帶圖紙,網(wǎng)頁內(nèi)容里面會有圖紙預覽,若沒有圖紙預覽就沒有圖紙。
- 4. 未經(jīng)權益所有人同意不得將文件中的內(nèi)容挪作商業(yè)或盈利用途。
- 5. 人人文庫網(wǎng)僅提供信息存儲空間,僅對用戶上傳內(nèi)容的表現(xiàn)方式做保護處理,對用戶上傳分享的文檔內(nèi)容本身不做任何修改或編輯,并不能對任何下載內(nèi)容負責。
- 6. 下載文件中如有侵權或不適當內(nèi)容,請與我們聯(lián)系,我們立即糾正。
- 7. 本站不保證下載資源的準確性、安全性和完整性, 同時也不承擔用戶因使用這些下載資源對自己和他人造成任何形式的傷害或損失。
最新文檔
- 餐飲店加盟店品牌授權合作協(xié)議范本
- 環(huán)境污染治理項目現(xiàn)場調(diào)查與檢測委托合同
- 2025年中國公制特長內(nèi)六角扳手市場調(diào)查研究報告
- 餐飲業(yè)商鋪租賃及特色餐飲品牌市場拓展協(xié)議
- 知識產(chǎn)權轉讓誠意金支付及解除合同
- 通信基站場地調(diào)研與電磁輻射評估服務協(xié)議
- 餐飲行業(yè)外賣配送員權益保障合作協(xié)議書
- 出差人員工作績效評價與激勵合同
- 高檔住宅小區(qū)停車位租賃合同模板
- 生態(tài)農(nóng)業(yè)園區(qū)場地租賃三方協(xié)議范本
- 教師法制教育培訓課件
- 眾包物流模式下的資源整合與分配
- 鐵路貨運流程課件
- 四川省成都市成華區(qū)2023-2024學年七年級上學期期末數(shù)學試題(含答案)
- 慢性硬膜下血腫護理要點大揭秘
- 管工基礎知識培訓課件
- 成人氣管切開拔管中國專家共識解讀
- “微”力量微博營銷
- 2022-2023學年山東省菏澤市成武縣人教版四年級下冊期末考試數(shù)學試卷(解析版)
- 浙江省舟山市2024屆數(shù)學高一第二學期期末質(zhì)量跟蹤監(jiān)視試題含解析
- 數(shù)據(jù)統(tǒng)計與分析教學大綱
評論
0/150
提交評論