



版權說明:本文檔由用戶提供并上傳,收益歸屬內容提供方,若內容存在侵權,請進行舉報或認領
文檔簡介
1、結課論文結課論文題 目:基于霍爾傳感器發動機轉速測儀設計基于霍爾傳感器發動機轉速測儀設計學生姓名: 學生學號: 系 別: 機電工程系 專 業: 機械化及其自動化 屆 別: 指導教師: 時 間: 1目目 錄錄1 摘要.22 系統概述.3 2.1 系統組成.3 2.2 霍爾傳感器測轉速原理及特性.5 2.3 光電式速度傳感器概述.6 2.4 系統工作原理及處理方法.7 2.4.1 系統工作原理.7 2.4.2 處理方法.93 霍爾傳感器測轉速系統的單元電路介紹.10 3.1 單片機的簡介 .12 3.2 脈沖產生電路設計.13 .3 霍爾傳感器選型.14 3.4 開關霍爾傳感器的性能分析.16 3
2、.5 系統顯示電路介紹.184.數碼管顯示和液晶顯示的利弊.185 基于霍爾傳感器測轉速系統的軟件設計.19參考文獻.22附錄.242摘要摘要在工程實踐中,經常會遇到各種需要測量轉速的場合,測量轉速的方法分為模擬式和數字式兩種。模擬式采用測速發電機為檢測元件,得到的信號是模擬量。數字式通常采用光電編碼器,霍爾元件等為檢測元件,得到的信號是脈沖信號。隨著微型計算機的廣泛應用,特別是高性能價格比的單片機的出現,轉速測量普遍采用以單片機為核心的數字式測量方法。本文便是運用 STC89C51 單片機控制的智能化轉速測量儀。電機在運行過程中,需要對其進行監控,轉速是一個必不可少的一個參數。本系統就是對電
3、機轉速進行測量,并可以和 PC 機進行通信,顯示電機的轉速,并觀察電機運行的基本狀況。本設計主要用 STC89C51 作為控制核心,由霍爾傳感器、LCD 顯示器、HIN232CPE 電平轉換、及 RS232 構成。詳細介紹了單片機的測量轉速系統及 PC 機與單片機之間的串行通訊。充分發揮了單片機的性能。本文重點是測量速度并顯示在 LCD 上。其優點硬件是電路簡單,軟件功能完善,測量速度快、精度高、控制系統可靠,性價比較高等特點。關鍵字:STC89C51 單片機、 轉速、 霍爾傳感器2、 系統概述系統概述32.12.1 系統組成系統組成在測量電機轉速時我們從采用了電磁感應式傳感器。當電機轉動時,
4、帶動傳感器。這種傳感器可以將轉速信號轉變成一個對應頻率的脈沖信號輸出,經過信號處理后輸出到計數器。脈沖信號的頻率與電機的轉速是一種線性的正比關系,因此對電機轉速的測量,實質上是對脈沖信號的頻率的測量。本課題采是以 STC89C52 單片機為核心將處理好的信號經過數據處理轉換成所測得的實際十進制信號的系統。系統硬件原理框圖如圖 2-1: 系統框圖原理如圖 2-1 所示,系統由傳感器、信號處理、顯示電路和系統軟件等部分組成。傳感器采用霍爾傳感器,負責將轉速轉化為脈沖信號。信號處理電路包含待測信號放大、波形變換、波形整形電路等部分,其中放大器實現對待測信號的放大,降低對待測信號的幅度要求,實現對小信
5、號的測量;波形變換和波形整形電路實現把正負交變的信號波形變換成可被單片機接受的 TTL/CMOS 兼容信號。 處理器采用 STC89C52 單片機,顯示器采用 LCD1602 液晶顯示器動態顯示。2.22.2 霍爾傳感器測轉速原理及特性霍爾傳感器測轉速原理及特性1、霍爾傳感器測速原理:霍爾器件是由半導體材料制成的一種薄片,器件的長、寬、高分別為 l、。若在垂直于薄片平面(沿厚度 )方向施加外磁場,在沿方向的兩個端面加一外電場,則有一定的電流流過。由于電子在磁場中運動,所以將受到一個洛侖磁力,其大小為:qVBf 式中:f洛侖磁力, 載流子電荷, 載流子運動速度, 磁感應強度。發動機霍爾傳感器單片
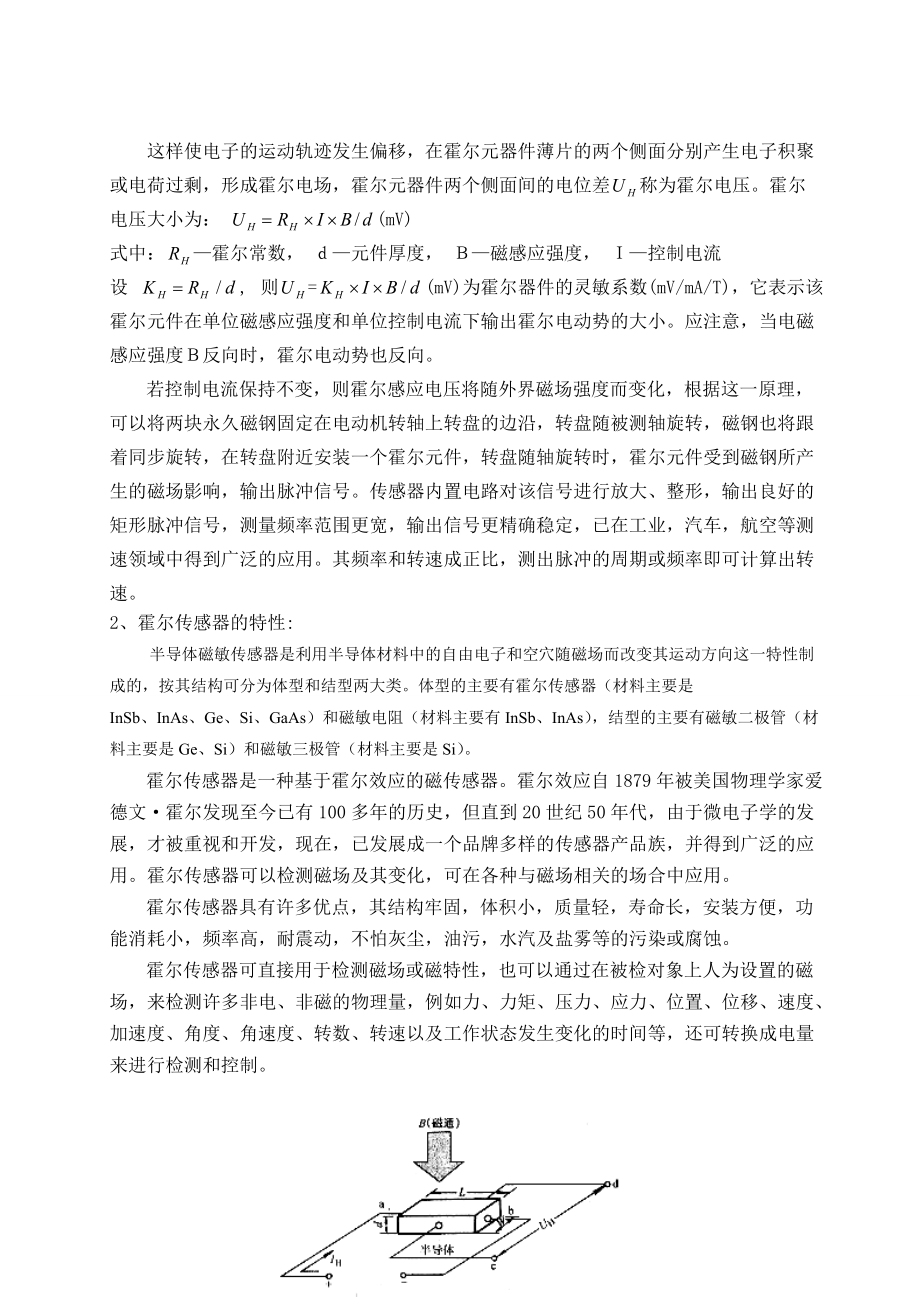
6、機STC89C52超速 報警液晶顯示轉速電源4這樣使電子的運動軌跡發生偏移,在霍爾元器件薄片的兩個側面分別產生電子積聚或電荷過剩,形成霍爾電場,霍爾元器件兩個側面間的電位差稱為霍爾電壓。霍爾HU電壓大小為: (mV) HUHRdBI/式中:霍爾常數, 元件厚度, 磁感應強度, 控制電流HR設 , 則=(mV)為霍爾器件的靈敏系數(mV/mA/T),它表示該HKHRd/HUHKdBI/霍爾元件在單位磁感應強度和單位控制電流下輸出霍爾電動勢的大小。應注意,當電磁感應強度反向時,霍爾電動勢也反向。若控制電流保持不變,則霍爾感應電壓將隨外界磁場強度而變化,根據這一原理,可以將兩塊永久磁鋼固定在電動機轉
7、軸上轉盤的邊沿,轉盤隨被測軸旋轉,磁鋼也將跟著同步旋轉,在轉盤附近安裝一個霍爾元件,轉盤隨軸旋轉時,霍爾元件受到磁鋼所產生的磁場影響,輸出脈沖信號。傳感器內置電路對該信號進行放大、整形,輸出良好的矩形脈沖信號,測量頻率范圍更寬,輸出信號更精確穩定,已在工業,汽車,航空等測速領域中得到廣泛的應用。其頻率和轉速成正比,測出脈沖的周期或頻率即可計算出轉速。 2、霍爾傳感器的特性:半導體磁敏傳感器是利用半導體材料中的自由電子和空穴隨磁場而改變其運動方向這一特性制成的,按其結構可分為體型和結型兩大類。體型的主要有霍爾傳感器(材料主要是InSb、InAs、Ge、Si、GaAs)和磁敏電阻(材料主要有 In
8、Sb、InAs) ,結型的主要有磁敏二極管(材料主要是 Ge、Si)和磁敏三極管(材料主要是 Si) 。霍爾傳感器是一種基于霍爾效應的磁傳感器。霍爾效應自 1879 年被美國物理學家愛德文霍爾發現至今已有 100 多年的歷史,但直到 20 世紀 50 年代,由于微電子學的發展,才被重視和開發,現在,已發展成一個品牌多樣的傳感器產品族,并得到廣泛的應用。霍爾傳感器可以檢測磁場及其變化,可在各種與磁場相關的場合中應用。霍爾傳感器具有許多優點,其結構牢固,體積小,質量輕,壽命長,安裝方便,功能消耗小,頻率高,耐震動,不怕灰塵,油污,水汽及鹽霧等的污染或腐蝕。霍爾傳感器可直接用于檢測磁場或磁特性,也可
9、以通過在被檢對象上人為設置的磁場,來檢測許多非電、非磁的物理量,例如力、力矩、壓力、應力、位置、位移、速度、加速度、角度、角速度、轉數、轉速以及工作狀態發生變化的時間等,還可轉換成電量來進行檢測和控制。5圖 2.2 霍爾元件的原理結構圖2.32.3 光電式速度傳感器概述光電式速度傳感器概述 光電式速度傳感器將速度的變化轉變成光通量的變化,在通過光電轉換元件將光通量的變化轉換成電量變化,光電轉換元件的工作原理是光電效應。光電效應是指用光照射某一物體,可以看作是一連串帶有一定能量為的光子轟擊在這個物體上,此時光子能量就傳遞給電子,并且是一個光子的全部能量一次性地被一個電子所吸收,電子得到光子傳遞的
10、能量后其狀態就會發生變化,從而使受光照射的物體產生相應的電效應可以分為三部分外光電效應、內光電效應、光生伏特效應。2.3.1速度檢測的原理 它是由裝在軸上的帶孔或縫隙的旋轉盤,光源,光接收器等組成,輸入軸與被測軸相連接。光源發出的光通過縫隙旋轉盤照射到光敏器件上,使光敏器件感光并產生電脈沖。轉軸連續轉動,光敏器件就輸出一系列與轉速及帶縫隙旋轉盤上縫隙數成正比的電脈沖數。在指示縫隙數一定的情況下,該脈沖數和轉速成正比。光電式速度傳感器原理圖 左圖 光線被遮住,接收器無信號 右圖 光線未被遮住,接收器有信號當帶縫隙的旋轉盤隨被測軸轉動時,由于圓盤上的縫隙間距與指示縫隙的相同,因此帶縫隙旋轉盤每轉一
11、周,光敏器件輸出與之相等的電脈沖,根據測量時間內的脈沖數 N 就可測出測速為 n=60N/Zt,式中,Z 為帶縫隙旋轉盤上的縫隙數:n 為轉速。2.3.2 脈沖信號調理電路由光電傳感器輸出的電信號一般還要經過相應放大和整形調理電路處理以達到一般數字電路能識別的矩形脈沖。采用施密特觸發器在脈沖的產生和整形電路中應用很廣。施密特觸發器是一種能夠把輸入波形整形成為適合于數字電路需要的矩形脈沖的電路。6同時該觸發器具有脈沖幅度鑒別且具有很好的抗干擾性。下圖為輸入輸出整形電路; 整形輸入輸出電路上圖可知通過施密特觸發器輸出的波形具有很好的方波脈沖特性,所以經過放大整形電路后信號再傳給頻率計或者單片機內部
12、的計數器通過一系列的數據運算就可以求得速度參數值了。 2.3.3 光電式傳感器速度檢測的優越特性 光電速度傳感器為非接觸式轉速表光電速度傳感器采用光學原理制造,屬于非接觸式速度測量儀表,它的測量距離一般可達 200mm 左右。光電轉速傳感器的測量無需與被測量對象接觸,不會對被測量軸形成額外的負載,因此光電速度傳感器的測量誤差更小,精度更高。 光電速度傳感器的結構緊湊光電速度傳感器的結構緊湊,主要由投射光線部件、接收光線部件也就是光敏元件和放大元件等組成,因此光電速度傳感器的體積設計小巧、內部結構精致,非常便于使用者的攜帶、安裝和使用。 光電速度傳感器的抗干擾性好光電速度傳感器多采用 LED 作
13、為光線投射部件,極少會出現光線停頓的情況,也不會存在燈泡燒毀等故障危險。另外,光電速度傳感器的光源都是經過特殊方式調制的,有極強的抗干擾能力,不會受普通光線的干擾。 光電速度傳感器的測量能力好光電速度傳感器的可采用光纖封裝,可于測量微小的物體,特別是微小旋轉體的測量,特別適用于高精密、小元件的機械設備測量。光電速度傳感器的運行穩定,有良好的可靠性,測量的精度較高,能滿足使用者的測量要求。2.3.4 光電式速度傳感器應用及發展前景光電式速度傳感器應用及發展前景 光電速度傳感器由于非接觸、性能高等優點,在測量速度時對被測物體損害小,所以其在測量領域有著舉足輕重的地位。比如現在很多電動車以及汽車都是
14、采用光電來檢測當前的行駛速度,從而及時通過顯示器很直觀顯示給用戶。其實車速傳感器種類很多,但是當車速高于 100km/h 時,一般其他傳感器測量的方法誤差較大,需采用非接觸式光電速度傳感器,測速范圍 0.5250km/h,重復精度 0.1%,距離測量誤差優于 0.3%。除7了汽車速度里程表會涉及到光電式速度傳感器,汽車發動機也會用到傳感器。近年來生產的 DF4 型機車都采用光電式速度傳感器代測速交流電機軸光電式速度傳感器產生信號供列車監控記錄裝置,軸產生的速度信號供機車雙針速度表、勵磁調節器、輪緣涂油器。這主要是因為光電式速度檢測具有高精度、抗震動和檢修方便等優點。現代工業生產自動化設備越來越
15、多,其中多電機的檢測也十分普遍,其中用光電式傳感器對電機以及柴油機的轉速檢測也十分常見,現在很多電控柴油機的轉速參數檢測看重此傳感器的線性度好、分辨率高、噪音小等優點而被選用。同時光電速度傳感器還和其他系統相互組成發展新興的產品設備,現在采用光電式速度傳感器和數據預處理電路及微機多路數據采集系統組成的車輛道路性能檢測器,可以為交通部門提供方便、便捷、準確、高效的車輛外場路面行駛性能檢測和新型車輛性能測試,是一種先進的車輛性能虛擬測試系統。它不僅能測量速度,也可以檢測加速度,距離、車輛制動等多種性能。且這種儀器經過使用,具有測量速度快、精確、功能擴展性好、性價比高、能夠適用各種機動車輛性能測量。
16、同時,光電式非接觸傳感器還可以測量鋼板、編織等連續運動目標的高精度測速度和測長。 在高速發展社會,人們對各類控制裝置技術要求越來越高。由于現在自動化程度、光電技術以及傳感器檢測技術迅速發展,加上現在對速度檢測也愈發重要。這就推動了光電式速度檢測的研究與發展了。目前光電式速度傳感器除了傳統意義上的速度檢測還主要朝著多用途、新型傳感器材料、創新傳感技術的開發、應對惡劣環境條件下工作如高溫、高壓等;還有低成本傳感器的開發以及傳感器與其他微技術相結合應用的發展。所以,以后不管是速度檢測還是其他物理量檢測的光電式傳感器以后發展前景非常好,應用將更加廣泛。2.42.4 系統工作原理及處理方法系統工作原理及
17、處理方法2.4.1 系統工作原理:轉速是工程上一個常用的參數,旋轉體的轉速常以每分鐘的轉數來表示。其單位為 rmin。由霍爾元件及外圍器件組成的測速電路將電動機轉速轉換成脈沖信號,送至單片機 STC89C51 的計數器 T0 進行計數,用 T1 定時測出電動機的實際轉速。此系統使用單片機進行測速,采用脈沖計數法,使用霍爾傳感器獲得脈沖信號。其機械結構也可以做得較為簡單,只要在轉軸的圓盤上粘上兩粒磁鋼,讓霍爾傳感器靠近磁鋼,機軸每轉一周,產生兩個脈沖,機軸旋轉時,就會產生連續的脈沖信號輸出。由霍爾器件電路部分輸出,成為轉速計數器的計數脈沖。控制計數時間,即可實現計數器的計數值對應機軸的轉速值。單
18、片機 CPU 將該數據處理后,通過 LCD 顯示出來。 傳感器 發動機單片機8 信號盤 GND 轉速測量系統安裝圖 2.4.2 處理方法:測速實際上就是測頻,通常可以用計數法、測脈寬法和等精度法來進行測試。所謂計數法,就是給定一個閘門時間,在閘門時間內計數輸入的脈沖個數;測脈寬法是利用待測信號的脈寬來控制計數門,對一個高精度的高頻計數信號進行計數。由于閘門與被測信號不能同步,因此,這兩種方法都存在1 誤差的問題,第一種方法適用于信號頻率高時使用,第二種方法則在信號頻率低時使用。等精度法則對高、低頻信號都有很好的適應性。此系統采用計數法測速。單片機 STC89C52 內部具有 2 個 16 位定
19、時/計數器 ,定時/計數器的工作可以由編程來實現定時、計數和產生計數溢出中斷要求的功能。在構成為定時器時,每個機器周期加 1(使用 12MHz 時鐘時,每 1us 加 1),這樣以機器周期為基準可以用來測量時間間隔。在構成為計數器時,在相應的外部引腳發生從 1 到 0 的跳變時計數器加 1,這樣在計數閘門的控制下可以用來測量待測信號的頻率。3 霍爾傳感器測轉速系統的單元電路介紹霍爾傳感器測轉速系統的單元電路介紹3.13.1 單片機的介紹單片機的介紹本設計采用 STC89C52 芯片,芯片采用 40 腳雙列直插式封裝,32 個 I/O 口,芯片工作電壓 3.85.5V,工作溫度 070C(商業級
20、) ,工作頻率可高達 30MHz,芯片的外形和引腳見下圖(2) 圖(2) STC89C52 外形和引腳圖整形電路9STC89C52 是一種低功耗、高性能 CMOS8 位微控制器,具有 8K 在系統可編程 Flash 存儲器。使用高密度非易失性存儲器技術制造,與工業 80C51 產品指令和引腳完全兼容。片上 Flash 允許程序存儲器在系統可編程,亦適于常規編程器。在單芯片上,擁有靈巧的 8 位 CPU 和在線系統可編程 Flash,使得 STC89C52 為眾多嵌入式控制應用系統提供高靈活、超有效的解決方案。 STC89C52 具有以下標準功能: 8k 字節 Flash,256 字節RAM,
21、32 位 I/O 口線,看門狗定時器,2 個數據指針,三個 16 位 定時器/計數器,一個 6 向量 2 級中斷結構,全雙工串行口,片內晶振及時鐘電路。另外,STC89C52 可降至0Hz 靜態邏輯操作,支持 2 種軟件可選擇節電模式。空閑模式下,CPU 停止工作,允許RAM、定時器/計數器、串口、中斷繼續工作。掉電保護方式下,RAM 內容被保存,振蕩器被凍結,單片機一切工作停止,直到下一個中斷或硬件復位為止。8 位微控制器 8K字節在系統可編程 Flash。P0P3 口結構,第一功能、第二功能請參考數據手冊(STC89C52 數據手冊下載地址www.mcu-) 。其基本結構框圖如圖 3.1,
22、包括:一個 8 位 CPU;4KB ROM;128 字節 RAM 數據存儲器;26 個特殊功能寄存器 SFR; 4 個 8 位并行 I/O 口,其中 P0、P2 為地址/數據線,可尋址 64KB ROM 或 64KB RAM;一個可編程全雙工串行口;具有 5 個中斷源,兩個優先級,嵌套中斷結構;兩個 16 位定時器/計數器; 一個片內震蕩器及時鐘電路;計數脈沖輸入 T0 T1 P0 P1 P2 P3 TXD RXD 0INT1INT時鐘源CPU串行接口并行 I/O 接口中斷系統特殊功能寄存器 SFR 128 字節RAM定時/計數器 T0、T14K ROM(EPROM)(8031 無)10 中斷
23、輸入圖 3.1 STC89C52 單片機結構框圖STC89C52 系列單片機中 HMOS 工藝制造的芯片采用雙列直插(DIP)方式封裝,有 40 個引腳。STC89C52 單片機 40 條引腳說明如下:(1)電源引腳。V正常運行和編程校驗(8051/8751)時為 5V 電源,V為接地CCSS(2)I/O 總線。P- P(P0 口),P- P(P1 口),P- P(P2 口),0 . 07 . 00 . 17 . 10 . 27 . 2P- P(P3 口)為輸入/輸出引線。0 . 37 . 3(3)時鐘。XTAL1:片內震蕩器反相放大器的輸入端。XTAL2:片內震蕩器反相放器的輸出端,也是內部
24、時鐘發生器的輸入端。(4)控制總線。由 P3 口的第二功能狀態和 4 根獨立控制線 RESET、EA、ALE、PSEN 組成。值得強調的是,P3 口的每一條引腳均可獨立定義為第一功能的輸入輸出或第二功能。如表 3.1 所示。表 3.1 P3 口線的第二功能定義:STC89C52 單片機的片外總線結構: 地址總線(AB):地址總線寬為 16 位,因此,其外部存儲器直接尋址為 64K 字節,16 位地址總線由 P0 口經地址鎖存器提供 8 位地址(A0 至 A7) ;P2 口直接提供 8 位地址(A8 至 A15) 。 數據總線(DB):數據總線寬度為 8 位,由 P0 提供。 控制總線(CB):
25、由 P3 口的第二功能狀態和 4 根獨立控制線 RESET、EA、ALE、PSEN 組成。3.2 脈沖產生電路設計LM358 內部包括有兩個獨立的、高增益、內部頻率補償的雙運算放大器,適合于電源電壓范圍很寬的單電源使用,也適用于雙電源工作模式,在推薦的工作條件下,電源電流與電源電壓無關。它的使用范圍包括傳感放大器、直流增益模塊和其他所有可用單P3 口引腳及線號引腳第二功能P3.0 (10)RXD串行輸入口P3.1 (11)TXD串行輸出口P3.2 (12)INT0外部中斷 0P3.3 (13)INT1外部中斷 1P3.4 (14)T0定時器 0 外部輸入P3.5 (15)T1定時器 1 外部輸
26、入P3.6 (16)WR外部數據存儲器寫脈沖P3.7 (17)RD外部數據存儲器讀脈沖1132674LM32432674LM32432674LM358R11KR21KR310KR41KR610KR510KRf10K+15V+15V-15V-15V-15V+15VU0+15VPort電源供電的使用運算放大器的場合。 LM358 的封裝形式有塑封 8 引線雙列直插式和貼片式。特性:內部頻率補償 直流電壓增益高(約 100dB) 單位增益頻帶寬(約 1MHz) 電源電壓范圍寬:單電源(330V)雙電源(1.5 一15V) 低功耗電流,適合于電池供電 低輸入偏流 低輸入失調電壓和失調電流 共模輸入電壓
27、范圍寬,包括接地 差模輸入電壓范圍寬,等于電源電壓范圍 輸出電壓擺幅大(0 至 Vcc-1.5V)如圖 3.2 所示,信號預處理電路為系統的前級電路,其中霍爾傳感元件 b,d 為兩電源端,d 接正極,b 接負極;a,c 兩端為輸出端,安裝時霍爾傳感器對準轉盤上的磁鋼,當轉盤旋轉時,從霍爾傳感器的輸出端獲得與轉速率成正比的脈沖信號,傳感器內置電路對該信號進行放大、整形,輸出良好的矩形脈沖信號,圖中 LM358 部分為過零整形電路使輸入的交變信號更精確的變換成規則穩定的矩形脈沖,便于單片機對其進行計數。 b cHda圖 3.2 信號預處理電路3.33.3 霍爾傳感器選型霍爾傳感器選型12霍爾效應自
28、 1879 年被美國物理學家愛德文霍爾發現至今已有 100 多年的歷史,但直到 20 世紀 50 年代,由于微電子學的發展,才被重視和開發,現在,已發展成一個品牌多樣的傳感器產品族,并得到廣泛的應用。霍爾傳感器是對磁敏感的傳感元件,由磁鋼、霍耳元件等組成。測量系統的轉速傳感器選用 OH137 的霍爾傳感器。 3.43.4 開關霍爾傳感器的性能分析開關霍爾傳感器的性能分析OH137 霍爾開關電路是為了適用客戶低成本高性能要求開發生產的系列產品,其應用領域廣泛,性能可靠穩定。電路內部由反向電壓保護器、電壓調整器,霍爾電壓發生器,差分放大器,史密特觸發器和集電極開路輸出級組成,能將變化的磁場訊號轉換
29、成數字電壓輸出。產品特點:產品一致性好、靈敏度可按照客戶要求定制、電路可和各種邏輯電路直接接口可實現功能:無觸點開關、位置檢測、速度檢測、流量檢測典型應用領域:直流無刷電機、家用電器、縫紉設備、紡織機械、編碼器、安全報警裝置等自動化控制領域極限參數:(TA=25)電源電壓 VCC4.5-24V 輸出負載電流 IO25mA工作溫度范圍 TA -4085 貯存溫度范圍 TS -55150電特性:TA=25量 值參 數符號測試條件最小典型最大單位電源電壓VCC4.5-24V輸出低電平電壓VOLVcc=4.5V, RL=2K,BBOP-200400mV輸出漏電流IOHVout=Vccmax,BBRP-
30、0.110A電源電流ICCVCC=Vccmax OC 開路-35mA輸出上升時間trVcc=12V, RL=820, CL=20pF-0.121.20S輸出下降時間tfVcc=12V, RL=820, CL=20pF-0.141.40S磁特性: (VCC=4.524V) 1mT=10GS13量 值參 數符號最小典型最大單 位工作點BOP-18mT釋放點BRP2-mT回 差BH6-8mT測試電路:磁電轉換特性:外型尺寸圖:管腿說明:1.電源 2. 地 3.輸出使用注意:使用注意:1)安裝時要盡量減小施加到電路外殼或引線上的機械應力。2)焊接溫度要低于 260,時間小于 3 秒。3)電路為 OC
31、輸出,需要在 1、3 腿(電源與輸出)之間加一上拉電阻。上拉電阻的阻值與工作電壓、通過電路的電流有關。VoutVcc=5VRLRL=820CL=20 pFCLBHBRPBOPBVOHVOL0功能方框圖:REGPin1.VCCPin3.VoutPin2.GND143.5 系統顯示電路介紹系統顯示電路介紹3.5.1晶顯示部分:晶顯示部分:顯示部分有兩個功能,在正常情況下,通過液晶顯示當前轉速值,當電機的轉速超過設定值通過蜂鳴器進行報警。其硬件和連線顯示圖如下圖:處理器部分 處理器采用的是單片機,對霍爾傳感器的脈沖進行處理,并將結果送給顯示器。其程序如附錄。報警部分 報警部分采用蜂鳴器,當電機轉速超
32、過設定值時,處理器就會將蜂鳴器驅動發出警報。.2 LCDLCD 顯示電路顯示電路1602LCD 分為帶背光和不帶背光兩種,基控制器大部分為 HD44780,帶背光的比不帶背光的厚,是否帶背光在應用中并無差別,兩者尺寸差別如下圖 x-2 所示:圖 x-2 1602LCD 尺寸圖顯示電路選擇液晶顯示屏 LCD6102,1602 字符型 LCD 通常有 14 條引腳線或 16 條引腳線的 LCD,多出來的 2 條線是背光電源線。 VCC(15 腳)和地線 GND(16 腳),其控制原理與 14 腳的 LC15D 完全一樣。(1)1602LCD 主要技術參數顯示容量為 162 個字符;
33、芯片工作電壓為 4.55.5V;工作電流為 2.0mA(5.0V) ;模塊最佳工作電壓為 5.0V;字符尺寸為 2.954.35(WH)mm。其引腳說明如表 3.10,寄存器選擇與控制編碼如表3.11 表 3.10 1602 字符型 LCD 顯示器管腳功能引腳符號功能說明1VSS一般接地2VDD接電源(+5V)3V0液晶顯示器對比度調整端,接正電源時對比度最弱,接地電源時對比度最高(對比度過高時會產生“鬼影” ,使用時可以通過一個 10K 的電位器調整對比度) 。4RSRS 為寄存器選擇,高電平 1 時選擇數據寄存器、低電平 0 時選擇指令寄存器。5R/WR/W 為讀寫信號線,高電平(1)時進
34、行讀操作,低電平(0)時進行寫操作。6EE(或 EN)端為使能(enable)端,下降沿使能。7DB0底 4 位三態、 雙向數據總線 0 位(最低位)8DB1底 4 位三態、 雙向數據總線 1 位9DB2底 4 位三態、 雙向數據總線 2 位10DB3底 4 位三態、 雙向數據總線 3 位11DB4高 4 位三態、 雙向數據總線 4 位12DB5高 4 位三態、 雙向數據總線 5 位1613DB6高 4 位三態、 雙向數據總線 6 位14DB7高 4 位三態、 雙向數據總線 7 位(最高位) (也是 busy flag)15BLA背光電源正極16BLK背光 電源負極表 3.11 寄存器選擇控制
35、編碼 RSR/W操作說明00寫入指令寄存器(清除屏等)01讀 busy flag(DB7) ,以及讀取位址計數器(DB0DB6)值10寫入數據寄存器(顯示各字型等)11從數據寄存器讀取數據1602 液晶顯示模塊內部的字符發生存儲器( CGROM)中已經存儲了 160 個不同的點陣字符圖形,這些字符有:阿拉伯數字、英文字母的大小寫、常用的符號、和日文假名等,每一個字符都有一個固定的代碼,比如大寫的英文字母 “A”的代碼是 01000001B(41H) ,顯示時模塊把地址 41H 中的點陣字符圖形顯示出來,就可以在顯示屏上看到字母“A” 。 1602 識別的是 ASCII 碼,試驗可以用 ASCI
36、I 碼直接賦值,在單片機編程中還可以用字符型常量或變量賦值,如 A 。 (2)控制器接口說明基本操作時序見表3.12 表3.12 基本操作時序讀狀態輸入RS=L,R/W=H,E=H輸出D0D7=狀態字寫指令輸入RS=L,R/W=L,D0D7=指令碼,E=高脈沖輸出無讀數據輸入RS=H,R/W=H,E=H輸出D0D7=數據17寫數據輸入RS=H,R/W=L,D0D7=數據,E=高脈沖輸出無對此液晶操作主要有以下幾種方法:寫命令(包括但不限于初始化、調節顯示位置、清除顯示)寫數據 (把一個字符的ASC 碼寫入液晶使其顯示)讀忙信號(液晶乃低速設備,每次操作前應該測試忙信號,確定其不忙時再操作)(3
37、)1602LCD的指令碼(命令碼)此液晶上電的時候需要初始化 典型的指令碼是38H,也就是上電的時候需要調用函數void write_cmd(unsigned char command)寫指令碼,即write_cmd(0 x38);執行完這個函數可以把液晶初始化成16x2 顯示5x7 的點陣8 位總線接口。此液晶支持的指令碼如表3.13所示,控制液晶是否顯示,光標是否顯示,光標是否閃爍的指令如表3.14所示,控制寫字符,光標或屏幕移動方向的指令如表3.15所示,移動光標的指令如表3.16所示。 表3.13 指令碼說明 指令碼功能00001DCBD=1 開顯示;D=0 關顯示C=1 顯示光標;C
38、=0 不顯示光標B=1 光標閃爍;B=0 光標不顯示000001NSN=1 當讀或寫一個字符后地址指針加一,且光標加一N=0 當讀或寫一個字符后地址指針減一,且光標減一S=1 當寫一個字符,整屏顯示左移(N=1) 或右移(N=0),以得到光標不移動而屏幕移動的效果。S=1 當寫一個字符,整屏顯示不移動表3.14 控制液晶顯示指令碼0000100008H關液晶顯示 光標不閃爍 不顯示光標位置0000100109H關液晶顯示 光標不閃爍 顯示光標位H關液晶顯示 光標不閃爍 不顯示光標位置000010110BH關液晶顯示 光標不閃爍 顯示光標位置000011000CH開液晶
39、顯示 光標不閃爍 不顯示光標位置000011010DH開液晶顯示 光標不閃爍 顯示光標位置000011100EH開液晶顯示 光標不閃爍 不顯示光標位置000011110FH開液晶顯示 光標不閃爍 顯示光標位置表3.15 寫完字符、光標或屏幕移動方向指令碼指令碼功能80H+地址碼(0-27H,40H-67H)設置數據地址指針表3.16 移動光標指令碼這是虛擬的液晶顯示圖 表示2 行16 列顯示 方框中的數字表示當前位置的指針80H81H82H83H84H85H86H87H88H89H8AH8BH8CH8DH8EH8FHC0HC1HC2HC3HC4HC5HC6HC7HC8HC9HCAHCBHCCH
40、CDHCEHCFH指令碼功能01H顯示清屏:1.數據指針清零 2.所有顯示清零02H顯示回車:1數據指針清零194.4.數碼管顯示和液晶顯示的利弊數碼管顯示和液晶顯示的利弊 液晶顯示材料具有明顯的優點:驅動電壓低、功耗微小、可靠性高、顯示信息量大、無閃爍、對人體無危害、生產過程自動化、成本低廉、可以制成各種規格和類型的液晶顯示器,便于攜帶等。但是需要有背光照明,且可視角度有限制。 1602 采用并口傳輸,速度快。數碼管,沒有驅動要加 CD4511 等外加電路。1602 內部集成有顯示芯片,可以識別英文字母、阿拉伯數字,優點:亮度高,顯示大。驅動部份的軟件簡單。 發光二極管響應速度可以達到納秒級
41、,也可以用作顯示,比如點陣,但是分辨率稍低于液晶材料。因為其功率較大,可以用于照明,大量發光二極管用作照明時,要做好散熱設計。 數碼管實際就是做成了具體顯示形式的發光二極管,可以顯示某些預先設置的圖像,顯示成本低于發光二極管點陣,但是顯示內容基本固定。數碼管顯示內容單一,液晶則比較豐富;數碼管一般就是一個 7 段的 8 字,液晶可以顯示各種內容。數碼管是自發光的,液晶是靠背光(環境)的。數碼管是LED 發光的效果,液晶是分子偏轉引起的暗影效果。數碼管比液晶耗電。5 5 基于霍爾傳感器的硬件電路設計基于霍爾傳感器的硬件電路設計霍爾傳感器測速原理圖霍爾傳感器測速原理圖20其測量過程大致是:測量轉速
42、的霍爾傳感器和電機軸同軸相連,并在機軸上安裝一個小磁鐵,機軸每轉一圈,與霍爾傳感器就接觸一次,霍爾傳感器感應磁場的變化通過上拉電阻在輸出口會產生一個低電平,并送給單片機,相應的發光二極管就會發亮,單片機 IO 口檢測到下降沿觸發中斷,通過控制計數的時間,即可實現計數器的計數值對應機軸的轉速值。單片機將該值處理后,在液晶顯示器顯示出來。一旦超速,單片機就會同過蜂鳴器發出報警。總體硬件電路圖和 PCB 圖如下圖所示:5 5 基于霍爾傳感器測轉速系統的軟件設計基于霍爾傳感器測轉速系統的軟件設計5.15.1 軟件流程圖軟件流程圖本設計軟件主要為主程序、數據處理顯示程序、定時器中斷服務程序三個部分。(1
43、)主程序主要完成初始化功能,包括 LED 顯示的初始化,中斷的初始化,定時器的初21始化,寄存器、標志位的初始化等。主程序流程圖如圖 5 所示。(2)數據處理顯示模塊程序。此模塊中單片機對在 1 秒內的計數值進行處理,轉換成r/min 送顯示緩存以便顯示。具體算法如下:設單片機每秒計數到 n 個值,即 n/2 (r/s)(圓盤貼兩個磁鋼)。則 n/2 (r/s)=30n(r/min)。即只要將計數值乘以 30 便可得到每分鐘電機的轉速。數據處理顯示模塊流程圖如圖 6 所示。圖 5-1 主程序流程圖 圖 5.2 數據處理顯示模塊流程圖 (3)定時器 1 中斷服務程序設計。定時器 1 完成計時功能,定時 50ms,進行定時中斷計數并每隔 1s 更新一次顯示數據。流程圖如圖 7 所示。秒標志位秒標志位 flag=1返回返回送顯示緩沖器送顯示緩沖器轉速的轉速的 16 進制數轉換成進制數轉換成 10 進制進制 BCD 碼碼處理轉速,轉換成處理轉速,轉換成r/min開始開始LCD 顯示緩存初始化顯示緩存初始化調用顯示子程序調用顯示
溫馨提示
- 1. 本站所有資源如無特殊說明,都需要本地電腦安裝OFFICE2007和PDF閱讀器。圖紙軟件為CAD,CAXA,PROE,UG,SolidWorks等.壓縮文件請下載最新的WinRAR軟件解壓。
- 2. 本站的文檔不包含任何第三方提供的附件圖紙等,如果需要附件,請聯系上傳者。文件的所有權益歸上傳用戶所有。
- 3. 本站RAR壓縮包中若帶圖紙,網頁內容里面會有圖紙預覽,若沒有圖紙預覽就沒有圖紙。
- 4. 未經權益所有人同意不得將文件中的內容挪作商業或盈利用途。
- 5. 人人文庫網僅提供信息存儲空間,僅對用戶上傳內容的表現方式做保護處理,對用戶上傳分享的文檔內容本身不做任何修改或編輯,并不能對任何下載內容負責。
- 6. 下載文件中如有侵權或不適當內容,請與我們聯系,我們立即糾正。
- 7. 本站不保證下載資源的準確性、安全性和完整性, 同時也不承擔用戶因使用這些下載資源對自己和他人造成任何形式的傷害或損失。
評論
0/150
提交評論