



版權說明:本文檔由用戶提供并上傳,收益歸屬內容提供方,若內容存在侵權,請進行舉報或認領
文檔簡介
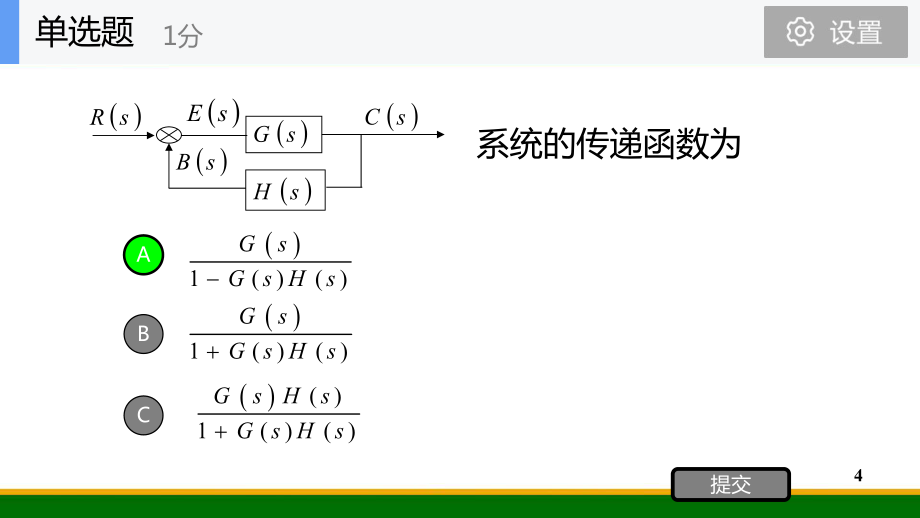
1、12一、結構圖的定義一、結構圖的定義二、結構圖的組成二、結構圖的組成三、控制系統結構圖的繪制三、控制系統結構圖的繪制四、結構圖的等效變換和化簡四、結構圖的等效變換和化簡五、自動控制系統的傳遞函數及其求取五、自動控制系統的傳遞函數及其求取0 回顧回顧3 sU sG1 sG2 sC sR )(21sGsG sC sR sC1 sG1 sG2 sC sR sC2 )(21sGsG sC sR0 回顧回顧4系統的傳遞函數為ABC提交 sE sG sH sC sR sB 1( )( )GsGs Hs 1( )( )GsGs Hs ( )1( )( )GsHsGs Hs單選題1分5AB提交 sG sC s
2、R sC sR sG sC sC? sG sG1單選題1分6 sG sC sR sQ sC sR sG1 sG Q s sG sC sR sQ sC sR sQ)(sG sG0 回顧回顧7 sC sR2 sR1 sR3 sR1 sR2 sR3 sC sR1 sR2 sR3 sC0 回顧回顧 sG sC sR sR sR sR sG sC sR sR sR sG sC sR sR8任何一個自動控制系統,經過結構圖的等效變換,可化為如任何一個自動控制系統,經過結構圖的等效變換,可化為如下所示的下所示的典型形式典型形式:五、自動控制系統的傳遞函數及其求取五、自動控制系統的傳遞函數及其求取)(1sG)
3、(2sG)(sH)(sC)(s )(sB)(sF( )R s-控制信號控制信號-被控信號被控信號- -偏差信號偏差信號-擾動信號擾動信號-反饋信號反饋信號( )Rs( )Cs( ) s( )Fs( )Bs9定義:定義:當反饋線斷開,并使當反饋線斷開,并使 ,系統工作在開環狀態,系統工作在開環狀態,反饋信號的拉氏變換與偏差信號拉氏變換之比。反饋信號的拉氏變換與偏差信號拉氏變換之比。)()()(ssBsGk 1( )G s2( )G s( )H s( )C s( ) s( )B s( )F sR(s)1 1、開環傳遞函數、開環傳遞函數0)(tf五、自動控制系統的傳遞函數及其求取五、自動控制系統的傳
4、遞函數及其求取10開環傳遞函數的求取開環傳遞函數的求取可見可見:系統開環傳遞:系統開環傳遞函數等于前向通路傳函數等于前向通路傳遞函數與反饋通道傳遞函數與反饋通道傳遞函數的乘積。遞函數的乘積。12( )( )( )( )( )( )kB sGsGs Gs Hss若令:若令:為前向通路傳遞函數,為前向通路傳遞函數,則:則:( )( )( )( )( )kB sGsG s H ss12( )( )( )G sGs Gs五、自動控制系統的傳遞函數及其求取五、自動控制系統的傳遞函數及其求取)(1sG)(2sG)(sH)(sC)(s )(sB)(sF( )R s11定義:定義:系統輸出量的拉氏變換與系統輸
5、入量的拉氏變換之比。系統輸出量的拉氏變換與系統輸入量的拉氏變換之比。)()()(sRsCs 2 對控制量的閉環傳遞函數記為:2 對擾動量的閉環傳遞函數記為:)()()(sFsCsf 2 2、閉環傳遞函數、閉環傳遞函數五、自動控制系統的傳遞函數及其求取五、自動控制系統的傳遞函數及其求取)(1sG)(2sG)(sH)(sC)(s )(sB)(sF( )R s12求取控制量的閉環傳遞函數求取控制量的閉環傳遞函數令令)(1)()()(1)()()()(1)()()()()(2121sGsGsHsGsGsHsGsGsGsGsRsCsk 0)(tf五、自動控制系統的傳遞函數及其求取五、自動控制系統的傳遞函
6、數及其求取)(1sG)(2sG)(sH)(sC)(s )(sB( )R s13求取擾動量的閉環傳遞函數求取擾動量的閉環傳遞函數 此時令此時令 ,將系統結構圖變形為:,將系統結構圖變形為:G2(s)H(s)-1G1(s)F(s)R(s)=0C(s)(1)()()(1)()()()(1)()()1)()(1)()()()(22122122sGsGsHsGsGsHsGsGsGsGsHsGsGsFsCskf 0)(tr五、自動控制系統的傳遞函數及其求取五、自動控制系統的傳遞函數及其求取)(1sG)(2sG)(sH)(sC)(s )(sB)(sF( )R s14系統的輸出量系統的輸出量 當系統同時存在控
7、制量和擾動量時,應用當系統同時存在控制量和擾動量時,應用疊加原理疊加原理,得:,得:( )( )( )( ) ( )( )( )rffC sCsCss R ss F s為系統單獨在為系統單獨在r(t)r(t)作用下的輸出;作用下的輸出;為系統單獨在為系統單獨在f(t)f(t)作用下的輸出。作用下的輸出。( )( )( )rCss R s( )( )( )ffCss F s五、自動控制系統的傳遞函數及其求取五、自動控制系統的傳遞函數及其求取)(1sG)(2sG)(sH)(sC)(s )(sB)(sF( )R s15定義:定義:系統偏差量的拉氏變換與系統輸入信號的拉氏變換之比。系統偏差量的拉氏變換
8、與系統輸入信號的拉氏變換之比。根據輸入信號的不同,分為對控制量的偏差傳遞函數,記為:根據輸入信號的不同,分為對控制量的偏差傳遞函數,記為:)()()(sRss 和對被擾動量的偏差傳遞函數,記為:和對被擾動量的偏差傳遞函數,記為:)()()(sFssf 3 3、系統的偏(誤)差傳遞函數、系統的偏(誤)差傳遞函數五、自動控制系統的傳遞函數及其求取五、自動控制系統的傳遞函數及其求取)(1sG)(2sG)(sH)(sC)(s )(sB)(sF( )R s16求取控制信號(參考輸入)的偏差傳遞函數求取控制信號(參考輸入)的偏差傳遞函數此時令此時令f(t)=0f(t)=012( )111( )( )1(
9、)( )( )1( )( )1( )kssR sGs Gs H sG s H sGs為求取方便,可將系統典型結構圖變形為如下形式:為求取方便,可將系統典型結構圖變形為如下形式: 五、自動控制系統的傳遞函數及其求取五、自動控制系統的傳遞函數及其求取H(s)G2(s)G1(s)R(s)(s)F(s)C(s)17求取擾動信號求取擾動信號f(t)的偏差傳遞函數的偏差傳遞函數( )?( )( )?fssF s此時令此時令r(t)=0r(t)=0五、自動控制系統的傳遞函數及其求取五、自動控制系統的傳遞函數及其求取)(1sG)(2sG)(sH)(sC)(s )(sB)(sF( )R s18的分子是ABCD提
10、交( )?( )( )?fssF s)(1sG)(2sG)(sH)(sC)(s )(sB)(sF( )R s1( )G s2( ) ( )G s H s2( )G s2( ) ( )G s H s單選題1分19求取擾動信號求取擾動信號f(t)的偏差傳遞函數的偏差傳遞函數)(1)()()()()(1)()()()()(2122sGsHsGsGsHsGsHsGsFsskf 此時令此時令r(t)=0r(t)=0五、自動控制系統的傳遞函數及其求取五、自動控制系統的傳遞函數及其求取)(1sG)(2sG)(sH)(sC)(s )(sB)(sF( )R s20系統的偏差量系統的偏差量( )( )( )( )
11、 ( )( )( )rffssss R ss F s)()()(sRssr 為在r(t)單獨作用下的偏差;)()()(sFssff 為在f(t)單獨作用下的偏差。根據疊加原理,有:根據疊加原理,有:五、自動控制系統的傳遞函數及其求取五、自動控制系統的傳遞函數及其求取例 已知系統結構圖如圖所示,試求系統的傳遞函數 和 。 sR sC sF sG1 sG2 sGC sGF)()(sRsC( )( )C sFs21五、自動控制系統的傳遞函數及其求取五、自動控制系統的傳遞函數及其求取解:應用線性疊加原理,首先令解:應用線性疊加原理,首先令 ,則系,則系統方框圖可表示為:統方框圖可表示為:例0)(sF
12、sR sC sG1 sG2 sGC sF sGF22五、自動控制系統的傳遞函數及其求取五、自動控制系統的傳遞函數及其求取例 化簡內回路: sR sC)()()(1)()(2121sGsGsGsGsGC sC sR)()()()()(1)()(212121sGsGsGsGsGsGsGCcGGGGGGGRC2121211得到: 23五、自動控制系統的傳遞函數及其求取五、自動控制系統的傳遞函數及其求取例再令再令 ,則系統方框圖可表示為:,則系統方框圖可表示為: 0)(sR sF sC sGF sGC sG2 sG1 sR sC sF sG1 sG2 sGC sGF24五、自動控制系統的傳遞函數及其求
13、取五、自動控制系統的傳遞函數及其求取例可將方框可將方框 和方框和方框 間的比較點后移至方間的比較點后移至方框框 和方框和方框 間:間: sG1 sGC sGF sG2 sF sC sGF sGC sG2 sG1 sG125五、自動控制系統的傳遞函數及其求取五、自動控制系統的傳遞函數及其求取例再化簡內回路再化簡內回路 sG1 sGF)()()(1)(212sGsGsGsGc sF sC26五、自動控制系統的傳遞函數及其求取五、自動控制系統的傳遞函數及其求取例 可將方框后的比較點后移至主通道上:可將方框后的比較點后移至主通道上: )()()(1)()(212sGsGsGsGsGcF)()()(1)
14、()(2121sGsGsGsGsGc sF sC sG1 sGF)()()(1)(212sGsGsGsGc sF sC27五、自動控制系統的傳遞函數及其求取五、自動控制系統的傳遞函數及其求取兩個子回路分別是并聯、負反饋正反饋、負反饋正反饋、并聯ABC提交)()()(1)()(212sGsGsGsGsGcF)()()(1)()(2121sGsGsGsGsGc sF sC28單選題1分例再化簡內回路再化簡內回路)(sF)(sC)()()(1)()()()()(121212sGsGsGsGsGsGsGsGccF)()()()()(1)()()(1212121sGsGsGsGsGsGsGsGcc)(s
15、F)(sC)()()()()(1)()()()()(12121212sGsGsGsGsGsGsGsGsGsGccF得到:ccFGGGGGGGGGGFC21212121129五、自動控制系統的傳遞函數及其求取五、自動控制系統的傳遞函數及其求取30系統建模方法:系統建模方法:p時域的微分方程時域的微分方程p復數域的傳遞函數復數域的傳遞函數p結構圖結構圖 31323 3 線性系統的時域分析法線性系統的時域分析法33 常用的系統分析方法常用的系統分析方法:時域分析法、根軌跡法和頻域分析法時域分析法、根軌跡法和頻域分析法,是經典控制理論的核心部分,是經典控制理論的核心部分。 時域分析法就是利用對系統的微
16、分方程或傳遞函數時域分析法就是利用對系統的微分方程或傳遞函數直接求直接求解解,得出得出系統輸出隨時間變化的系統輸出隨時間變化的規律規律,從而分析研究控制,從而分析研究控制系統的系統的時間工作特性時間工作特性的方法。的方法。時域分析法是一種直接在時域分析法是一種直接在時間域時間域中對系統進行分析的方法,中對系統進行分析的方法,具有具有直觀直觀、準確準確的優點,可以提供系統時間響應的的優點,可以提供系統時間響應的全部信息全部信息。34正弦函數正弦函數單位加速度函數單位加速度函數單位斜坡函數單位斜坡函數單位階躍函數單位階躍函數單位脈沖函數單位脈沖函數 復域表達式復域表達式 時域表達式時域表達式名名
17、稱稱0),(1 tt0, tt0,2/2 tt0),( tt tAsins/12/1 s3/1 s1)/(22 sA在學習性能指標之前,首先選擇典型輸入信號。在學習性能指標之前,首先選擇典型輸入信號。一、典型輸入信號一、典型輸入信號35在典型輸入信號的作用下,任一控制系統的時間響應都由在典型輸入信號的作用下,任一控制系統的時間響應都由動態過程動態過程(transient response)和)和穩態過程穩態過程(steady-state response)兩部分組成。)兩部分組成。二、動態過程與穩態過程二、動態過程與穩態過程t36控制系統的首要性能是穩定性快速性準確性阻尼性ABCD提交單選題1
18、分371 1、動態過程、動態過程動態過程又稱動態過程又稱過渡過程過渡過程或或瞬態過程瞬態過程,指系統在典型輸入信號,指系統在典型輸入信號的作用下,系統輸出量從初始狀態到最終狀態的的作用下,系統輸出量從初始狀態到最終狀態的響應過程響應過程。動態過程表現為動態過程表現為衰減、發散或等幅振蕩衰減、發散或等幅振蕩形式。形式。一個實際可運行的系統,其動態過程一定是衰減的,即系統一個實際可運行的系統,其動態過程一定是衰減的,即系統是是穩定穩定的。的。動態過程可提供系統的穩定信息、響應速度以及阻尼情況,動態過程可提供系統的穩定信息、響應速度以及阻尼情況,以以動態性能動態性能來描述。來描述。二、動態過程與穩態
19、過程二、動態過程與穩態過程382 2、穩態過程、穩態過程又稱穩態響應,指系統在典型輸入信號的作用下,當時間又稱穩態響應,指系統在典型輸入信號的作用下,當時間趨于無窮趨于無窮時,系統輸出量的時,系統輸出量的表現方式表現方式。表征系統輸出量最終復現輸入量的程度,提供系統有關穩表征系統輸出量最終復現輸入量的程度,提供系統有關穩態誤差的信息,以態誤差的信息,以穩態性能穩態性能來描述。來描述。控制系統在典型輸入信號的作用下的性能指標,通常由控制系統在典型輸入信號的作用下的性能指標,通常由動動態性能態性能和和穩態性能穩態性能組成。組成。二、動態過程與穩態過程二、動態過程與穩態過程391 1、動態性能、動態
20、性能通常描述穩定的系統在通常描述穩定的系統在單位階躍函數單位階躍函數作用下,動態過程作用下,動態過程隨時間的變化狀況的指標,稱為隨時間的變化狀況的指標,稱為動態性能指標動態性能指標。穩定穩定是控制系統能夠運行的是控制系統能夠運行的首要條件首要條件,只有當動態過程,只有當動態過程收斂時,研究系統的動態性能才有意義。收斂時,研究系統的動態性能才有意義。三、動態性能與穩態性能三、動態性能與穩態性能40單位階躍響應單位階躍響應)(h)(th)(9.0h)(5.0h)(1.0h0上升時間峰值時間調節時間延遲時間超調量誤差帶穩態誤差tt三、動態性能與穩態性能三、動態性能與穩態性能41延遲時間(延遲時間(d
21、elay timedelay time)響應曲線第一次到達其響應曲線第一次到達其終值一半終值一半所需的時間所需的時間dt)(h)(th)(9.0h)(5.0h)(1.0h0上升時間峰值時間調節時間延遲時間超調量誤差帶穩態誤差tt三、動態性能與穩態性能三、動態性能與穩態性能42上升時間(上升時間(rise timerise time)響應從終值的響應從終值的10%10%上升到終值的上升到終值的90%90%所需的時間所需的時間rt)(h)(th)(9.0h)(5.0h)(1.0h0上升時間峰值時間調節時間延遲時間超調量誤差帶穩態誤差tt三、動態性能與穩態性能三、動態性能與穩態性能43上升時間亦可定
22、義為響應從上升時間亦可定義為響應從零第一次零第一次上升到上升到終值終值所需的時間所需的時間。上升時間是。上升時間是系統響應速度系統響應速度的一種度量。的一種度量。)(h)(th)(9.0h)(5.0h)(1.0h0上升時間峰值時間調節時間延遲時間超調量誤差帶穩態誤差tt三、動態性能與穩態性能三、動態性能與穩態性能44峰值時間(峰值時間(peak timepeak time) 響應超過其終值到達響應超過其終值到達第一個峰值第一個峰值所需的時間所需的時間pt)(h)(th)(9.0h)(5.0h)(1.0h0上升時間峰值時間調節時間延遲時間超調量誤差帶穩態誤差tt三、動態性能與穩態性能三、動態性能與穩態性能45調節時間(調節時間(settling timesettling time) 響應到達并響應到達并保持在終值保持在終值5%(5%(2%)2%)內內所需的最短時間所需的最短時間st)(h)(th)(9.0h)(5.0h)(1.0h0上升時間峰值時間調節時間延遲時間超調量誤差帶穩態誤差tt三、動態性能與穩態性能三、動態性能與穩態性能46超調量(超調量(percent overshootpercent overshoot) 指響應的指響應的最大偏離量最大偏離量與終值之差與終值比的百分數與終值之差與終值比的百分數%)(h)(th)(9.0h)(5
溫馨提示
- 1. 本站所有資源如無特殊說明,都需要本地電腦安裝OFFICE2007和PDF閱讀器。圖紙軟件為CAD,CAXA,PROE,UG,SolidWorks等.壓縮文件請下載最新的WinRAR軟件解壓。
- 2. 本站的文檔不包含任何第三方提供的附件圖紙等,如果需要附件,請聯系上傳者。文件的所有權益歸上傳用戶所有。
- 3. 本站RAR壓縮包中若帶圖紙,網頁內容里面會有圖紙預覽,若沒有圖紙預覽就沒有圖紙。
- 4. 未經權益所有人同意不得將文件中的內容挪作商業或盈利用途。
- 5. 人人文庫網僅提供信息存儲空間,僅對用戶上傳內容的表現方式做保護處理,對用戶上傳分享的文檔內容本身不做任何修改或編輯,并不能對任何下載內容負責。
- 6. 下載文件中如有侵權或不適當內容,請與我們聯系,我們立即糾正。
- 7. 本站不保證下載資源的準確性、安全性和完整性, 同時也不承擔用戶因使用這些下載資源對自己和他人造成任何形式的傷害或損失。
最新文檔
- 基金公司產品管理辦法
- 冰箱裝修知識培訓課件
- 腸道健康學術課件
- 肝膽脾胃科護理課件
- 福清畢業考數學試卷
- 肝病中醫教學課件
- 肛裂中醫課件
- 高處作業培訓課件
- 東城三年級期中數學試卷
- 東莞高二聯考數學試卷
- 中國水稻種子市場經營優勢與發展趨勢前景分析研究報告
- 學校空調維修合同書
- 銷售部門報價管理制度
- 集合、復數、不等式與常用邏輯用語(4考點+19題型)-2025年高考數學復習專練(解析版)
- 陪診員培訓課件
- 氯苯唑酸葡胺軟膠囊-藥品臨床應用解讀
- 2024-2025學年深圳市初三英語中考適應性考試英語試題(含答案)
- 2024安陽文峰區中小學教師招聘考試試題及答案
- T-UNP 253-2024 語音數據標注系統技術規范
- 2024年青海省省直機關遴選公務員考試真題
- 超聲科臨床操作中的倫理與法規
評論
0/150
提交評論