



版權說明:本文檔由用戶提供并上傳,收益歸屬內容提供方,若內容存在侵權,請進行舉報或認領
文檔簡介
1、目目 錄錄1 1 緒論緒論 1 12 2 永磁同步電動機的原理永磁同步電動機的原理 2 23 3 永磁同步電機的直接轉矩控制永磁同步電機的直接轉矩控制 3 33.13.1 永磁同步電機的數學模型永磁同步電機的數學模型 3 33.23.2 永磁同步電機直接轉矩控制系統的實現永磁同步電機直接轉矩控制系統的實現 4 43.2.13.2.1 轉矩增量與定子電壓空間矢量關系模型轉矩增量與定子電壓空間矢量關系模型 4 43.2.23.2.2 定子磁鏈控制定子磁鏈控制 5 53.33.3 逆變器開關時間控制模型逆變器開關時間控制模型 6 63.43.4 永磁同步電機直接轉矩控制的系統永磁同步電機直接轉矩控制
2、的系統 7 74 4 系統仿真模型的組建系統仿真模型的組建 8 84.14.1 仿真系統仿真系統 9 94.24.2 其他模型的建立其他模型的建立 12125 5 仿真結果與其分析仿真結果與其分析 14146 6 結束語結束語 1616參考文獻參考文獻 1616致致 17171 / 201 緒緒 論論直接轉矩控制(DTC)是在空間矢量調速理論的基礎上發展起來的一種新型交流電動機調速策略,其基本思想是根據交流電動機的轉矩要求,直接選擇合適的定子電壓空間矢量,實現交流電動機電磁轉矩的快速響應。由于直接在定子兩相靜止坐標系統下分析交流電動機的數學模型,將定子磁鏈與電磁轉矩作為被控制量,根據給定轉矩與
3、實際轉矩以與給定定子磁鏈與實際定子磁鏈的偏差來直接選擇電壓矢量,從而避免了矢量控制中許多復雜的矢量變換計算。所以直接轉矩控制策略具有控制方式簡單、轉矩響應快、便于實現全數字化等優點。直接轉矩控制在異步電動機調速系統中的應用已經比較成熟,但在永磁同步電動機(PMSM)伺服控制系統中的應用研究相對滯后。由于永磁同步電動機具有體積小、重量輕、運行可靠、功率密度高等諸多優點,將DTC控制策略應用于永磁同步電機控制中,以提高電機的快速轉矩響應,成為研究者關注的課題究的熱點課題。由于電機轉矩和磁鏈的計算對控制系統性能影響較大,為了獲得滿意的轉矩計算,仿真研究是最有效的工具和手段。本文中利用 MATLAB
4、軟件下的 Simulink 仿真工具對 PMSM DTC 系統進行仿真;同時還詳細地介紹了 DTC 系統中各控制計算單元的模型的建立,并分析控制系統的性能。2 / 202 永磁同步電動機的原理永磁同步電動機的原理永磁同步電動機的轉子旋轉速度與定子繞組所產生的旋轉磁場的速度是一樣的。正由于這樣,同步電動機的電流在相位上是超前于電壓的,即同步電動機是一個容性負載。同步電動機在結構上大致有兩種:永磁同步電動機的轉子磁鋼的幾何形狀不同,使得轉子磁場在空間的分布可分為正弦波和梯形波兩種。因此,當轉子旋轉時,在定子上產生的反電動勢波形也有兩種:一種為正弦波;另一種為梯形波。這樣就造成兩種同步電動機在原理、
5、模型與控制方法上有所不同,為了區別由它們組成的永磁同步電動機交流調速系統,習慣上又把正弦波永磁同步電動機組成的調速系統稱為正弦型永磁同步電動機(PMSM)調速系統;而由梯形波(方波)永磁同步電動機組成的調速系統,在原理和控制方法上與直流電動機系統類似,故稱這種系統為無刷直流電動機(BLDCM)調速系統。永磁同步電動機轉子磁路結構不同,則電動機的運行特性、控制系統等也不同。根據永磁體在轉子上的位置的不同,永磁同步電動機主要可分為,表面式和置式。在表面式永磁同步電動機中,永磁體通常呈瓦片形,并位于轉子鐵心的外表面上,這種電機的重要特點是直、交軸的主電感相等;而置式永磁同步電機的永磁體位于轉子部,永
6、磁體外表面與定子鐵心圓之間有鐵磁物質制成的極靴,可以保護永磁體。這種永磁電機的重要特點是直、交軸的主電感不相等。因此這兩種電機的性能有所不同。3 / 203 永磁同步電機的直接轉矩控制永磁同步電機的直接轉矩控制3.1 永磁同步電機的數學模型永磁同步電機的數學模型直接轉矩控制是對定轉子磁鏈間的夾角也就是對轉矩角 進行控制。先推導轉矩角與電機電磁轉矩的數學關系。其中要用到與轉子同步旋轉的 d-q 坐標系,d軸正方向為轉子磁鏈方向;與定子同步旋轉的 x-y 坐標系,x 軸正方向為定子磁鏈方向;兩相 - 靜止坐標系, 軸正方向與電機 a 軸重合。如下圖 3-1 所示。圖 3-1 PMSM 在不同坐標系
7、下的矢量圖在建立 PMSM 數學模型前,先對 PMSM 作如下假設:忽略電動機鐵心的飽和,不計電動機中的渦流和磁滯損耗,轉子無阻尼繞組,則永磁同步電機在 d-q 坐標系下的基本方程如下: (1)dd dfL i (2)qq qL i(3)ds ddrqUR iP (4)qs qqrdUR iP (5)3()2epd qq dTnii (6)d remrdtTTJB式中:d、q為定子磁鏈 d、q 軸分量;Ld、Lq為定子繞組 d、q 軸等效電感;id、iq為定子電流 d、q 軸分量;Ud、Uq為定子電壓 d、q 軸分量;f為轉子磁鏈;Rs為定子繞組電阻;P 為微分算子;r為轉子機械角速度;Te為
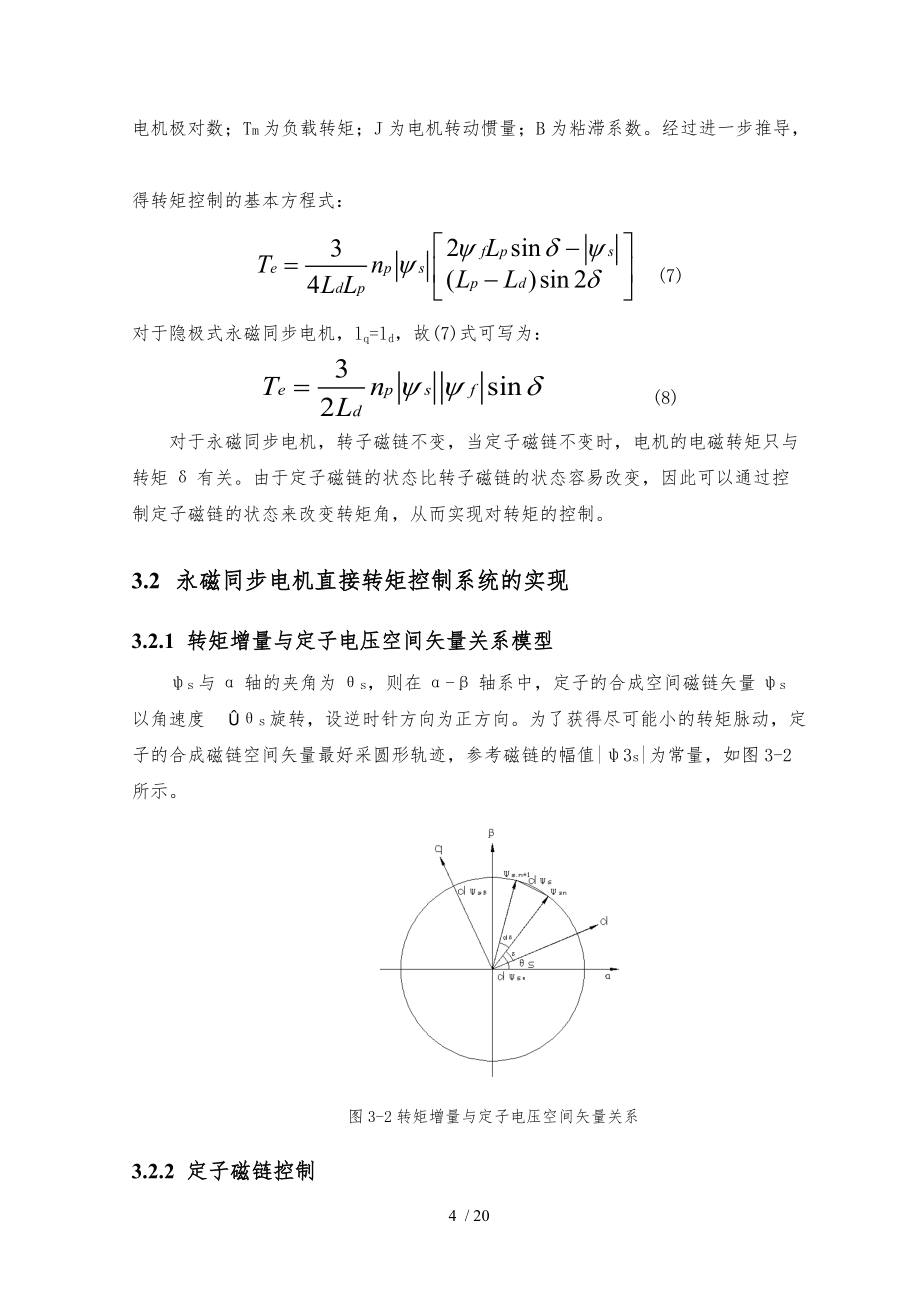
8、電磁轉矩;np為4 / 20電機極對數;Tm為負載轉矩;J 為電機轉動慣量;B 為粘滯系數。經過進一步推導,得轉矩控制的基本方程式: (7)2sin3()sin24fpsepspddpLTnLLL L對于隱極式永磁同步電機,lq=ld,故(7)式可寫為: (8) 3sin2epsfdTnL 對于永磁同步電機,轉子磁鏈不變,當定子磁鏈不變時,電機的電磁轉矩只與轉矩 有關。由于定子磁鏈的狀態比轉子磁鏈的狀態容易改變,因此可以通過控制定子磁鏈的狀態來改變轉矩角,從而實現對轉矩的控制。3.2 永磁同步電機直接轉矩控制系統的實現永磁同步電機直接轉矩控制系統的實現3.2.1 轉矩增量與定子電壓空間矢量關系
9、模型轉矩增量與定子電壓空間矢量關系模型s與 軸的夾角為 s,則在 - 軸系中,定子的合成空間磁鏈矢量 s以角速度 s旋轉,設逆時針方向為正方向。為了獲得盡可能小的轉矩脈動,定子的合成磁鏈空間矢量最好采圓形軌跡,參考磁鏈的幅值|3s|為常量,如圖 3-2所示。圖 3-2 轉矩增量與定子電壓空間矢量關系3.2.2 定子磁鏈控制定子磁鏈控制5 / 20在永磁同步電機中施加零電壓矢量時,定子磁鏈停止轉動,轉矩幾乎維持恒定。利用這一特點,可以采用具有零電壓矢量的新型開關表實現直接轉矩控制,把零電壓矢量看成保持當前轉矩的作用,利用零電壓矢量來減小轉矩的波動,以與減少逆變器開關次數和轉矩的脈動。開關表中輸出
10、量與輸入量的關系見附表 1,其中v(xxx)中 x=1 表示逆變器相應相的上臂導通,0 表示下臂導通。16的分布見圖 3-3。 區域的劃分是以 - 坐標系的 軸為基準確定的,因此定子磁鏈的位置可用其 - 軸分量 、估算的定子旋轉磁鏈來確定。v1v6為逆變器輸出電壓的空間電壓矢量,當施加電壓矢量與 s夾角小于 /2 時,將使磁鏈幅值增加;當大于 /2 時,磁鏈幅值減小當電壓矢量超前于 s時,轉矩增加;落后于s時,轉矩減小。附表 1 逆變器開關表12345611(001)2(001)3(001)4(001)5(001)6(001)00(000)7(111)0(000)7(111)0(000)7(1
11、11)0-11(001)5(101)4(110)6(001)2(010)3(011)16(001)2(010)3(011)1(001)5(101)4(110)07(111)0(000)7(111)0(000)7(111)0(000)1-15(101)4(110)6(001)2(010)3(011)1(001)6 / 20圖 3-3 空間電壓矢量和分區用 、 分別表示電機磁鏈和轉矩的給定值和實際值的誤差狀態,當給定值比實際值大時狀態為 1,否則狀態為 0,則由 、 的狀態以與磁鏈所處分區的位置,便可按表 1 選擇開關電壓矢量,并為了方便在 MATLAB/simulink 中實現查表的位置我們假設
12、一個變量的到:(9)。21S3.3 逆變器開關時間控制模型逆變器開關時間控制模型如圖2所示,設定當前采樣周期的定子磁鏈矢量為,下一采樣周期的定子磁sn鏈矢量為s.n+1,所以給定轉矩和估計轉矩之間存在誤差。將式(8)的定子磁鏈增量ds分解到-軸系的兩坐標軸上, (10)sin()sin()sin()cos()ssssssssssssssdu tu tdu tu tAAAA再利用Clarke逆變換,將式(10)映射到定子三相坐標系A、B、C軸系上,把定子磁鏈增量分配到三相繞組,如:sd (11)sin()sin3sin3ABCsAsBsssssCssdtdu tutdtA A定子合成磁鏈矢量的增
13、量在各相繞組上的分量惟一地由參考電壓在該繞組上的作用時間決定,參考電壓在各相繞組上的作用時間是定子合成磁鏈矢量空間位置s角的函數,如:s7 / 20 (12)sin()sin3sin3ABCsssssssssttttutt AAA其中為定子合成磁鏈矢量相對于A相繞組(軸)的空間角位移。一個周期定s子參考電壓矢量的作用時間根據式(8)和(9)求得,即sust (13)sssssssddtduuu上式中,雖然ds和us都是空間矢量,但是二者方向一樣,所以直接采用其幅值進行計算。|us|是參考電壓空間矢量的幅值為直流母線電壓。3.4 永磁同步電機直接轉矩控制的系統永磁同步電機直接轉矩控制的系統永磁同
14、步電機直接轉矩控制的系統結構如圖 3-4 所示,是一個包含速度和轉矩的雙閉環系統。主要包括電機轉速 pi 調節器、定子磁鏈和轉矩觀測器、轉矩與磁鏈滯環比較控制器、最佳開關邏輯選擇表、逆變器等。以和分別作為轉矩和定子磁鏈的給定值,te、s分別為利用 - 坐標系的電壓和電流估算得的轉矩和磁鏈實際值,在調速系統中可作為轉速調節器的輸出,與實際轉矩比較后經轉矩滯環控制器輸出轉矩增減信號。當需要增大電磁轉矩時,轉矩控制器輸出 1,逆變器輸出電壓所形成的空間電壓矢量使 s向前轉動,由于電機的電磁時間常數小于機電時間常數,使定子磁鏈轉速快于轉子磁鏈轉速,其結果是 增大,增大了實際電磁轉矩。轉矩控制器輸出 0
15、 時,將減小實際轉矩。進入穩態后,轉矩給定值與實際值之差落在轉矩控制器的滯環,轉速平均值也穩定為同步轉速。為給定的定子磁鏈,與實際定子磁鏈相比較后,經磁鏈滯環控制器輸出磁鏈增減信號,定子磁鏈保持在一個規定的圍。這兩個控制器的輸出共同確定開關表的輸出值,控制逆變器的 pwm波輸出。在控制過程中,在每一個采樣周期開始,非零導通時間所對應的逆變器開關同時導通,向PMSM三相繞組供電,然后根據每相繞組的通電時間控制對應功率開關截止。一個周期每個橋臂只有一個功率開關動作一次,具有恒定的開關頻率,實際是一種恒頻脈寬調制方式。該控制算法徹底避免了傳統DTC控制以與SVM控制策略中磁8 / 20鏈工作扇區的判
16、別以與矢量合成等復雜的數據和邏輯計算,特別適合于數字PWM控制器件,可以直接用于DSP、FPGA等控制平臺。圖 3-4 永磁同步電機直接轉矩控制的系統結構9 / 204 系統仿真模型的組建系統仿真模型的組建4.1 仿真系統仿真系統本文主要是利用 Matlab 軟件進行仿真,Matlab 的含義是矩陣實驗室(MatrixLaboratory)。它集數值分析、矩陣運算、信號處理和圖形顯示于一體,構成了一個方便的、界面友好的用戶環境。在這個環境下,對所要求求解的問題,用戶只需要簡單地列出數學表達式,其結果便以數值或圖形方式顯示出來。Matlab的推出得到了各個領域專家學者的廣泛關注,其強大的擴展功能
17、更為各個工程領域提供了分析和設計的基礎。Matlab 包括被稱作工具箱(Toolbox)的各類應用問題的求解工具。隨著Matlab 版本的不斷升級,其所含的工具箱的功能也越來越豐富,因此應用圍也越來越廣泛,成為涉與數值分析的各類設計不可或缺的工具。Simulink 是基于 Matlab 的框圖設計環境,可以用來對各種動態系統進行建模、分析和仿真,它的建模圍廣泛,可以針對任何能用數學來描述的系統進行建模,例如航空航天動力學系統、衛星控制制導系統、通信系統、船舶與汽車等,其中包括了連續、離散,條件執行,事件驅動,單速率、多速率和混雜系統等。Simulink 提供了利用鼠標拖放的方法來建立系統框圖模
18、型的圖形界面,而且還提供了豐富的功能塊以與不同的專業模塊集合,利用 Simulink 幾乎可以做到不書寫一行代碼即完成整個動態系統的建模工作。除此之外,Simulink 還支持 Stateflow,用來仿真事件驅動過程。Simulink 是從底層開發的一個完整的仿真環境和圖形界面,是模塊化了的編程工具,它把 Matlab 的許多功能都設計成一個個直觀的功能模塊,把需要的功能模塊用連線連起來就可以實現需要的仿真功能了。也可以根據自己的需要設計自己的功能模塊,Simulink 功能強大,界面友好是一種很不錯的仿真工具。Simulink 仿真具有以下的特點:(1)交互建模10 / 20Simulin
19、k 提供了大量的功能塊,方便用戶快速地建立動態系統模型,建模時只需要使用鼠標拖放庫中的功能塊,并將它們連接起來;用戶可以通過將塊組成子系統建立多級模型;對塊和連接的數目沒有限制。(2)交互仿真Simulink 框圖提供了交互性很強的非線性仿真環境。用戶可以通過下拉菜單執行仿真,或者用命令行進行批處理。仿真結果可以在運行的同時通過示波器或者圖形窗口顯示。(3)能夠擴充和定制Simulink 的開放式結構允許用戶擴充仿真環境的功能。(4)與 Matlab 和工具箱集成由于 Simulink 可以直接利用 Matlab 的數學、圖形和編程功能,用戶可以直接在 Simulink 下完成諸如數據分析、過
20、程自動化、優化參數等工作。工具箱提供的高級設計和分析能力可以通過 Simulink 的屏蔽手段在仿真過程中執行。(5)專用模型庫Simulink 的模型庫可以通過專用元件集進一步擴展。在 MATLAB/simulink 中建立了如圖 4-1 的系統仿真模型。其中包括它包括 3/2變換、磁鏈估算和轉矩估算等子系統。進行磁鏈估算時,磁鏈初值不宜為 0,否則仿真會出錯.因此在磁鏈估算子系統中,要給積分模塊賦一個初值。圖 4-1 基于 MATLAB/simulink 的 PMSM DTC 系統的仿真模型區段判斷的實現11 / 20定子磁鏈矢量所在的區段我們可以根據磁鏈在 坐標上的分量進行判定,由 的正
21、負確定定子磁鏈矢量的象限,再由 tan()決定定子磁鏈矢量的具體位置,其實現模塊如圖 5 所示。其中的 MATLAB 函數模塊是用來調用 MATLAB中求反正切的函數,開關模塊是一個 2 選 1 的輸出,其輸出再經過圖 4-2 到圖 4-4子系統便可以得到區段結果。表 2 為磁鏈位置所對應的區段值。圖 4-2 角度計算圖 4-3 磁鏈區段的確定角度區段角度區段-/2, -/66-/6, /61/6, /22/2,5 /635/6 ,7/64-/2,-/65表 2 磁鏈區段和角度的關系12 / 20圖 4-4 轉矩和磁鏈誤差信號4.2 其他模型的建立其他模型的建立按照以上相類似的方法,我們對逆變
22、器與其驅動信號、坐標的變換 u和 u的獲取、電機磁鏈的估算和轉矩的估算等等。建立相應的 Simulink 模型其子模塊如圖 4-5 到圖 4-8。圖 4-5 逆變器與其驅動信號13 / 20圖 4-6 靜止 abc 坐標系到 坐標系的變換圖 4-7 定子磁鏈估算模型圖 4-8 轉矩估算模型14 / 205 仿真結果與其分析仿真結果與其分析永磁同步電機的主要參數為:電阻 rs=1.652,電感 ld=lq=8.5mh,永磁磁鏈,極對數 p=4,轉動慣量 j=0.0008kgm2。系統給定轉速0.175fbn=500r/min,零負載啟動。在 t=0.5s 突加 4nm 的負載。仿真所得的轉矩、轉
23、速、電流波形分別如圖 5-1 到圖 5-3。在逆變器和 PMSM 子模塊間,接入電壓測量裝置以觀測的相間電壓,因為當Simulink 模塊與 PSB 模塊相連時,要求接入一個電氣測量模塊,否則仿真會出現錯誤。圖 5-1 轉矩波形圖 5-2 轉速波形圖 5-3 電流波形可以看出電機在通電以后,迅速到達最大轉矩,然后很快回到穩定值,在 0.5s時,負載轉矩突變為 4nm,輸出轉矩波形跟隨給定,實現了對電機的瞬時力矩的控制。轉速迅速達到給定值 500rad/s,在 0.5s 負載轉矩發生變化時,轉速有微小的震蕩后回到給定值;從電流波形可看出:三相電流按正弦規律變化,說明電機的運行是正常的,在 0.5
24、s 定子電流發生變化,可以看出此控制系統響應快,穩定性好,抗干擾性能高,仿真波形與理論分析情況一致。15 / 206 結束語結束語與傳統的建模方法相比采用 MATLAB 的 PMSM 直接轉矩控制的建模方法可以在simulink 環境下建立系統的仿真模型并進行仿真實現,仿真結果表明:波形符合理論分析,系統運行平穩,具有良好得靜、動態性能。這為進一步分析和設計永磁同步電機直接轉矩控制系統提供了有效的手段和工具。參考文獻參考文獻1 田淳,胡育文永磁同步電機直接轉矩控制理論與控制方案的研究電工技術學報,2002(2):8112 王沫然Simulink 4 建模與動態仿真:電子工業,20023 平CN
25、C 系統中指數升降速控制曲線的算法微特電機,2003,31(5):16174 治田新型數字化可編程頻率合成器 DDS現代電子技術 2003, (12):26305 周俊峰,濤基于 FPGA 的直接數字頻率合成器的設計和實現國外電子元器件,2003, (1):466 唐任遠現代永磁電機理論與設計:機械工業,19977 王成元矢量控制交流伺服取得電動機:機械工業,19958 Tiitinen P, Surandra MThe next generation motor control method,DTC direct 16 / 20torque control. Proceedings of t
26、he 1996 International Conference on Power Electronics, Drives and Energy Systems for Industrial Growth. IEEE. Part. 1New York, USA, 1996:3743畢業設計(論文)原創性聲明和使用授權說明畢業設計(論文)原創性聲明和使用授權說明原創性聲明原創性聲明本人重承諾:所呈交的畢業設計(論文) ,是我個人在指導教師的指導下進行的研究工作與取得的成果。盡我所知,除文中特別加以標注和致的地方外,不包含其他人或組織已經發表或公布過的研究成果,也不包含我為獲得與其它教育機構的學位
27、或學歷而使用過的材料。對本研究提供過幫助和做出過貢獻的個人或集體,均已在文中作了明確的說明并表示了意。作 者 簽 名:日 期:指導教師簽名: 日期:使用授權說明使用授權說明本人完全了解大學關于收集、保存、使用畢業設計(論文)的規定,17 / 20即:按照學校要求提交畢業設計(論文)的印刷本和電子版本;學校有權保存畢業設計(論文)的印刷本和電子版,并提供目錄檢索與閱覽服務;學校可以采用影印、縮印、數字化或其它復制手段保存論文;在不以贏利為目的前提下,學校可以公布論文的部分或全部容。作者簽名: 日 期:學位論文原創性聲明學位論文原創性聲明本人重聲明:所呈交的論文是本人在導師的指導下獨立進行研究所取
28、得的研究成果。除了文中特別加以標注引用的容外,本論文不包含任何其他個人或集體已經發表或撰寫的成果作品。對本文的研究做出重要貢獻的個人和集體,均已在文中以明確方式標明。本人完全意識到本聲明的法律后果由本人承擔。作者簽名: 日期: 年 月 日學位論文使用授權書學位論文使用授權書本學位論文作者完全了解學校有關保留、使用學位論文的規定,同意學校保留并向國家有關部門或機構送交論文的復印件和電子版,允許論文被查閱和借閱。本人授權大學可以將本學位論文的全部或部分容編入有關數據庫進行檢索,可以采用影印、縮印或掃描等復制手段保存和匯編本學位論文。涉密論文按學校規定處理。18 / 20作者簽名:日期: 年 月 日導師簽名: 日期: 年 月 日致 時間飛逝,大學的學習生活很快就要過去,在這四年的學習生活中,收獲了很多,而這些成績的取得是和一直關心幫助我的人分不開的。首先非常感學校開設這個課題,為本人日后從事計算機方面的工作提供了經驗,奠定了基礎。本次畢業設計大概持續了半年,現在終于到結尾了。本次畢業設計是對我大學四年學習下來最好的檢驗。經過這次畢業設計,我的能力有了很大的提高,
溫馨提示
- 1. 本站所有資源如無特殊說明,都需要本地電腦安裝OFFICE2007和PDF閱讀器。圖紙軟件為CAD,CAXA,PROE,UG,SolidWorks等.壓縮文件請下載最新的WinRAR軟件解壓。
- 2. 本站的文檔不包含任何第三方提供的附件圖紙等,如果需要附件,請聯系上傳者。文件的所有權益歸上傳用戶所有。
- 3. 本站RAR壓縮包中若帶圖紙,網頁內容里面會有圖紙預覽,若沒有圖紙預覽就沒有圖紙。
- 4. 未經權益所有人同意不得將文件中的內容挪作商業或盈利用途。
- 5. 人人文庫網僅提供信息存儲空間,僅對用戶上傳內容的表現方式做保護處理,對用戶上傳分享的文檔內容本身不做任何修改或編輯,并不能對任何下載內容負責。
- 6. 下載文件中如有侵權或不適當內容,請與我們聯系,我們立即糾正。
- 7. 本站不保證下載資源的準確性、安全性和完整性, 同時也不承擔用戶因使用這些下載資源對自己和他人造成任何形式的傷害或損失。
最新文檔
- 肛裂中醫課件下載
- 德藝期中數學試卷
- 豐臺區2024數學試卷
- 2025年04月重慶醫科大學附屬第二醫院整形與頜面外科科室秘書編外崗位招聘1人筆試歷年專業考點(難、易錯點)附帶答案詳解
- 職高數學職業模塊課件
- 霍亂防治知識培訓課件
- 職教英語說課課件
- 2025至2030船塢密封和遮蔽物行業市場深度研究與戰略咨詢分析報告
- 2025至2030充氣袋行業市場發展分析及前景趨勢與行業市場深度研究及發展前景投資可行性分析報告
- 職業高中英語高一課件
- 小紅書種草營銷師(初級)認證考試真題試題庫(含答案)
- 梅尼埃病的中醫治療
- 戰略合作框架協議
- 藥品經營使用和質量監督管理辦法2024年宣貫培訓課件
- 偽現金交易培訓
- 全國職業院校技能大賽賽項規程(高職)(高職)化工生產技術
- 零工市場(驛站)運營管理 投標方案(技術方案)
- 殘疾人日常護理知識
- 2024-2030年全球及中國光學器件中的透鏡行業市場現狀供需分析及市場深度研究發展前景及規劃可行性分析研究報告
- 《跨境直播運營》課件-跨境直播的內容組織
- 某醫院WIFI覆蓋解決方案
評論
0/150
提交評論