


版權說明:本文檔由用戶提供并上傳,收益歸屬內容提供方,若內容存在侵權,請進行舉報或認領
文檔簡介
1、飛思卡爾智能車電磁組程序員成長之路1.飛思卡爾智能車小車入門智能汽車電磁組簡介:第五屆全國大學“飛思卡爾杯智能汽車競賽新增加了“電磁組.根據比賽技術要求,電磁組競賽,需要選手設計的智能車能夠檢測到道路中央線下電線中20KHz交變電流產生的磁場來導引小車沿著道路行駛.在平時調試和比賽過程中需要能夠滿足比賽技術要求的20KHz的交流電源驅動賽道中央線下的線圈.同時參賽選手需要自行設計適宜的電磁傳感器來檢測賽道信息完成智能尋跡功能.智能車制作是一個涵蓋電子、電氣、機械、限制等多個領域和學科的科技創新活動.簡單點來說可以將其分為硬件電路包括電源、MUC限制局部、電機驅動、傳感器、機械、算法三方面的設計
2、.電磁組在機械方面可以參照光電組的設計方案,這里不再贅述.本設計指導只講述20KHz電源、電磁傳感器設計方案以及局部算法.智能車對單片機模塊需求:電磁組電機RN-26O?機;rvw如o電磁組芯片電機雙電機四路PW限制轉向舵機一路PWM限制路徑識別傳感曙電磁傳感器假設干路AD采集速度采集編碼兩路脈沖計數或10中斷其他傳感器起電線識別中斷采集避障超聲波雷達假設干AD聚集機械限制方案搖頭舵機P網限制參數設置按健10限制交互界面0LED顯示SPI或者10模擬從上面的羅列功能需求和電磁對實時性要求來說,對單片機資源要求比擬松,目前大多數笈思卡爾的單片機都能滿足要求,對參數選F來說抓緊選擇一個熟悉的芯片上
3、手,去做算法調試.飛思卡爾單片機資源:單片機薦頻推到IOADPWMSPI10中VrPITDMA料熟資成度S12840M8716CH8CH1204無席K60100/120/150M10416353104415席KL2548M6716,1x141X6+2X216724校多CF525580M100881424低MPC560440/64M1061320432416CH低智能車程序框架:智能車涉及到10模塊,中斷模塊,PWM模塊,DMA模塊,AD模塊等.在車模調試中還有必須的模塊.如SCI模塊、定時器模塊,SPI模塊等.其中還涉及到一些算法和數據的存儲和搬移.一個好程序框架對智能車的制作過程中會到達事半
4、功倍的效果.但是就智能車這樣系統來說,如果完全專門移植一個操作系統或者寫一個程序的bootload,感覺有一些本末倒置,如果有成熟的,可以借用的,那樣會比擬好.2.電磁傳感器的使用圖競賽跑道起跑區示意圖20KHz電源參考設計方案:電源技術指標要求:根據官網關于電磁組賽道說明,20KHZ電源技術要求如下:1 .驅動賽道中央線下鋪設的直徑的漆包線;2 .頻率范圍:20K+2K;3 .電流范圍:50-150mA;圖是賽道起跑區示意圖,在中央線鋪設有漆包線.首先分析賽道鋪設銅線的電抗,從而得到電源輸出的電壓范圍.我們根據普通的練習賽道總長度50m,使用直徑漆包線.在30攝氏度下,銅線的電阻率大約為歐姆
5、平方毫米/米.計算可以得到中央線的電阻大約為歐姆.根據導線電感量計算機公式:4,L=21X/ln-0.75)(nil)其中1,d的單位均為emo可以計算出直徑為,長度50米的銅線電感量為131微亨.對應20KHz下,感抗約為歐姆.可以看出,線圈的電感量小于其電阻值.由于導線的電感量與鋪設的形狀有關系,上述計算所得到的電感量不是準確數值.另外,我們可以在輸出時串接電容來抵消電感的感抗.所以估算電源電壓輸出范圍的時候,我們不再特別考慮線圈的電感對于電流的影響.為了方便設計,我們設計電源輸出電壓波形為對稱方波.由于線圈電感的影響,線圈中的電流為上升、下降沿緩變的方波波形.如圖所示:電壓玻形QV圖線圈
6、驅動電壓與電流示意圖對于電阻為歐姆的賽道導線,流過100mA的電流,電壓峰值應該大于3Vo考慮到賽道長度有可能進一步增加、漆包線的直徑減少等原因,設計電源輸出電壓的峰值為6Vo在輸出電流為150mA的時候,電源輸出功率大約為.電源組成:電源電路包括振蕩電路、功率輸出電路、恒流限制電路以及電源等組成.如圖所示.圖各分部功能可以采用不同的電路實現.下面分別給出官網電流源各模塊的參考設計方案.除叼4圖電源組成框圖振蕩電路產生中央頻率為20KHz的對稱方波信號.為了滿足功率輸出電路的需要,輸出極性相反的信號,可以使用普通的555時基電路產生振蕩信號,也可以使用簡易的單片機產生振蕩信號.為了方便調試,信
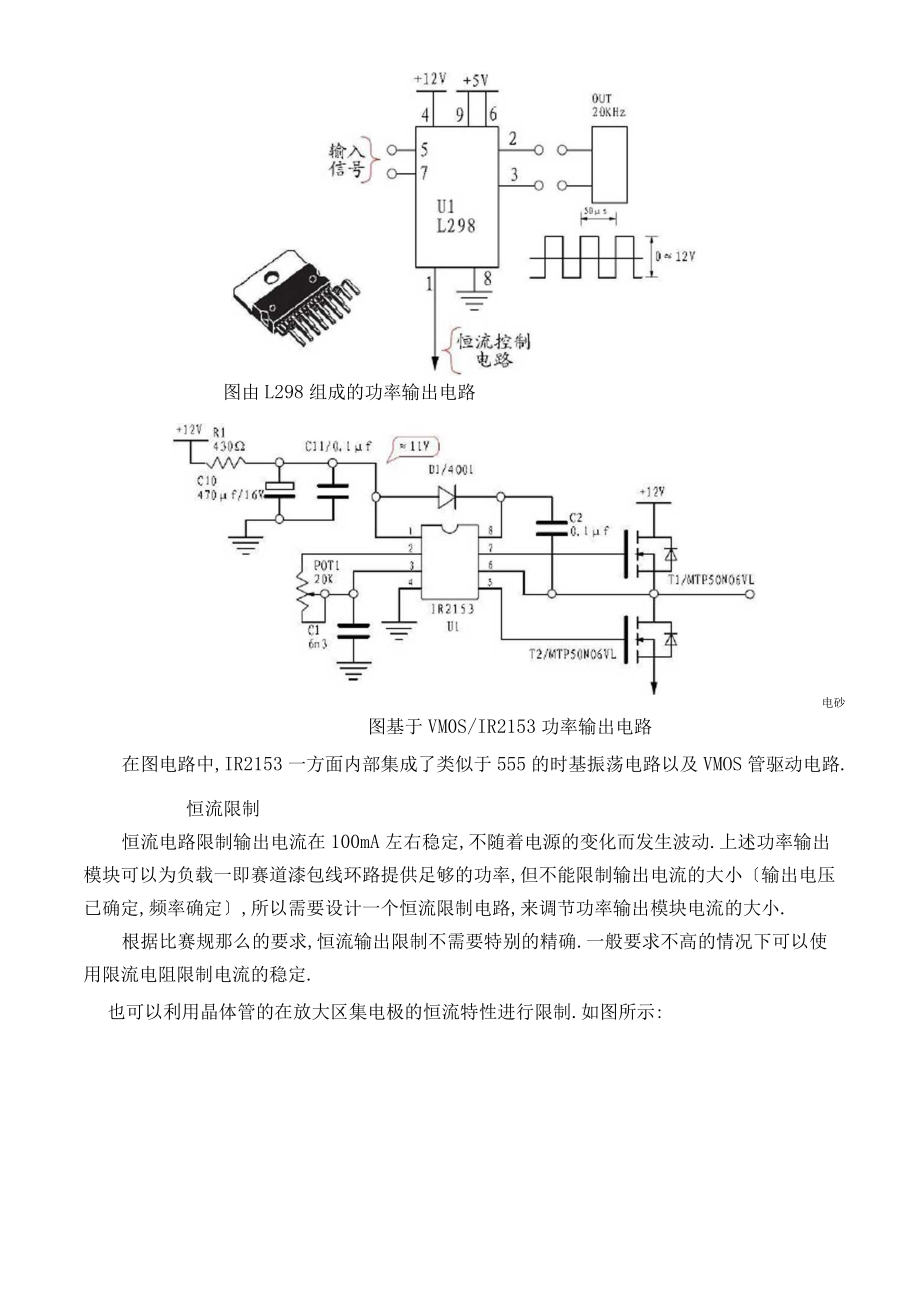
7、號頻率能夠在一定范圍內進行調整.555多諧振蕩器原理請大家參考數電課本,實際外圍電路電路參數需要自己設定,不一定要和官方給的一樣.1815相當于一個反向器,為閉環回路提供信號源.555電路較為簡單,如果想更精確的產生20KHz當然也可以用單片機來產生所需信號,同時還可以外部連接顯示接口顯示當前的輸出頻率、輸出電流的大小.功率輸出電路由于輸出驅動信號電壓、電流、頻率較大,需要一定輸出功率驅動跑道線圈,因此最后需要功率輸出電路.可以采用分立大功率晶體管搭建輸出電路,也可以使用的電機驅動橋電路集成模塊.選擇時需要注意電路的頻率響應應該大20KHz,輸出功率大于2W.在制作時需要注意電路的散熱.圖分別
8、給出了三種不同的功率輸出電路,大家可以作為參考.圖基于分立元器件的功率輸出電路圖由L298組成的功率輸出電路電砂圖基于VM0S/IR2153功率輸出電路在圖電路中,IR2153一方面內部集成了類似于555的時基振蕩電路以及VMOS管驅動電路.恒流限制恒流電路限制輸出電流在100mA左右穩定,不隨著電源的變化而發生波動.上述功率輸出模塊可以為負載一即賽道漆包線環路提供足夠的功率,但不能限制輸出電流的大小輸出電壓已確定,頻率確定,所以需要設計一個恒流限制電路,來調節功率輸出模塊電流的大小.根據比賽規那么的要求,恒流輸出限制不需要特別的精確.一般要求不高的情況下可以使用限流電阻限制電流的穩定.也可以
9、利用晶體管的在放大區集電極的恒流特性進行限制.如圖所示:圖利用晶體管進行恒流限制晶體管可使用大功率雙極性晶體管,也可以使用功率MOS管.從電流設定穩定性和恒流特性來看,使用功率雙極性晶體管更好.電源局部提供電路中所需要的各種低壓穩壓電源.保證信號振蕩電路和恒流限制電路的穩定性.可以使用一般穩壓集成電路實現.參考設計電路實際電路圖的說明:設計PCB時最好給C2233音頻功率管留足散熱片的空間,它和L298一樣是電路中主要的發熱器件.555震蕩電路的參數也不一定要和上圖一樣,可以根據公式/1.43(%+2)時算出電阻的大小,只要便于調節的參數均可.電源調試輸出電流調試:調節恒流設定電位器,使得輸出
10、電流在100mA左右.外部負載電阻在10和100歐姆的時候,都應該在50-150mA之內.注意:所接負載電阻必須要是大功率的,而且要充分考慮到它的散熱性,千萬不能直接接上一般的直插式電阻就去測電流,會爆掉的!水泥電阻如果有較大阻值的話可以考慮用它作為恒流源負載實際調試時候可以空載下將電流表串入功率管集電極測量,效果是一樣的.輸出頻率調試:可使用示波器或者具有頻率測量的萬用表測量輸出電壓的頻率.外接10歐姆的負載進行測量負載上電壓的頻率.調節頻率設定電位器使得電源頻率輸出在2土2kHz.調試完畢后,使得電源在接入跑道線圈之下連續工作1個小時,電源輸出的電流、頻率都不會漂移出要求的范圍,那么所設計
11、的電源滿足要求.考前須知功率管散熱:在外部負載比擬小的時候,電路中功率輸出晶體管、恒流限制晶體管上的功耗比擬大.特別是在整個電路的電源電壓較高比方+12V的時候,需要對于功耗比擬大的晶體管進行合理的散熱,以提升電源的工作熱穩定性.串接諧振電容:當賽道比擬長的時候,賽道線圈的電感較大,可以在賽道線圈連接中通過串聯電容抵消賽道線圈的感抗.具體電容的大小可以根據實際測量賽道的電感進行匹配.電磁組傳感器及模路徑檢測設計參考方案:設計原理:電磁組比賽競賽車模需要能夠通過自動識別賽道中央線位置處由通有100mA交變電流的導線所產生的電磁場進行路徑檢測.除此之外在賽道的起跑線處還有永磁鐵標志起跑線的位置.1
12、、導線周圍的電磁場根據麥克斯韋電磁場理論,交變電流會在周圍產生交變的電磁場.智能汽車競賽使用路徑導航的交流電流頻率為20kHz,產生的電磁波屬于甚低頻VLF電磁波.甚低頻頻率范圍處于工頻和低頻電磁破中間,為3kHz30kHz,波長為100km10km.如圖所示:圖電流周圍的電磁場示意圖導線周圍的電場和磁場,根據一定規律分布.通過檢測相應的電磁場的強度和方向可以反過來獲得距離導線的空間位置,這正是我們進行電磁導航的目的.由于賽道導航電線和小車尺寸1遠遠小于電磁波的波長入,電磁場輻射能量很小如果天線的長度1遠小于電磁波長,在施加交變電壓后,電磁波輻射功率正比于天線長度的四次方,所以能夠感應到電磁波
13、的能量非常小.為此,我們將導線周圍變化的磁場近似緩變的磁場,根據檢測靜態磁場的方法獲取導線周圍的磁場分布,從而進行位置檢測.由畢奧-薩伐爾定律知:通有穩恒電流I長度L的直導線周圍會產生磁場,距離導線距離為r處P點的磁感應強度為:B=fsinGdO(1)有此得:B=Mcos%-cos%,對于無限長直電流來說,上式中二°,°2=兀,那么仃B二黑Anr圖無限長導線周圍的磁場強度磁場檢測方法:我們有很多測量磁場的方法,磁場傳感器利用了物質與磁場之間的各種物理效應:磁電效應電磁感應、霍爾效應、磁致電阻效應、磁機械效應、磁光效應、核磁共振、超導體與電子自旋量子力學效應.下面列出了一些測
14、量原理以及相應的傳感器:1 .電磁感應磁場測量方法:電磁線磁場傳感器,磁通門磁場傳感器,磁阻抗磁場傳感器.2 .霍爾效應磁場測量方法:半導體霍爾傳感器、磁敏二極管,磁敏三極管.3 .各向異性電阻效應AMR磁場測量方法.4 .載流子自旋相互作用磁場測量方法:自旋閥巨磁效應磁敏電阻、自旋閥三極管磁場傳感器、隧道磁致電阻效應磁敏電阻.5 .超導量子干預SQUID磁場測量方法:SQUID薄膜磁敏元件.6 .光泵磁場測量方法:光泵磁場傳感器.7 .質子磁進動磁場測量方法.8 .光導纖維磁場測量方法.以上各種磁場測量方法所依據的原理各不相同,測量的磁場精度和范圍相差也很大.我們需要選擇適合車模競賽的檢測方
15、法,除了檢測磁場的精度之外,還需要對于檢測磁場的傳感器的頻率響應、尺寸、價格、功耗以及實現的難易程度進行考慮.在下面所介紹的檢測方法中,我們選取最為傳統的電磁感應線圈的方案.它具有原理簡單、價格廉價、體積小(相對小)、頻率響應快、電路實現簡單等特點,適應于初學者快速實現路經檢測的方案.通電導線周圍的磁場是一個矢量場,場的分布如圖所示.如果在通電直導線兩邊的周圍豎直放置兩個軸線相互垂直并位于與導線相垂直平面內的線圈,那么可以感應磁場向量的兩個垂直分量,進而可以獲得磁場的強度和方向.圖導線周圍的感應電磁場導線中的電流按一定規律變化時,導線周圍的磁場也將發生變化,那么線圈中將感應出一定的電動勢.根據
16、法拉第定律,線圈磁場傳感器的內部感應電壓E與磁場B(t)>電磁線圈的圈數N、截面積A的關系有:E=(NA)xQo%)dB(£)"(£)dtdt感應電動勢的方向可以用楞次定律來確定.由于本設計中導線中通過的電流頻率較低,為20kHz,且線圈較小,令線圈中央到導線的距離為r,認為小范圍內磁場分布是均勻的.再根據圖3所示的導線周圍磁場分布規律,那么線圈中感應電動勢可近似為:dkdlKE=即線圈中感應電動勢的大小正比于電流的變化率,反比于線圈中央到導線的距離.其中常量K為與線圈擺放方法、線圈面積和一些物理常量有關的一個量,具體的感應電動勢常量須實際測定來確定.雙水平
17、線圈檢測方案不同的線圈軸線擺放方向,可以感應不同的磁場分量.我們先討論一種最簡單的線圈設置方案:雙水平線圈檢測方案.在車模前上方水平方向固定兩個相距L的線圈,兩個線圈的軸線為水平,高度為h,如圖所示.為了討論方便,我們在跑道上建立如下的坐標系,假設沿著跑道前進的方向為z軸,垂直跑道往上為y軸,在跑道平面內垂直于跑到中央線為x軸.xyz軸滿足右手方向.假設在車模前方安裝兩個水平的線圈.這兩個線圈的間隔為L,線圈的高度為h,參見下列圖所示.左邊的線圈的坐標為(x,h,z),右邊的線圈的位置(x-L,h,z).由于磁場分布是以z軸為中央的同心圓,所以在計算磁場強度的時候我們僅僅考慮坐標(x,y).由
18、于線圈的軸線是水平的,所以感應電動勢反映了磁場的水平分量.根據公式(2)可以h知道感應電動勢大小與京京成正比.圖雙水平線圈檢測方案變化取值,如下列圖所示:如果只使用一個線圈,感應電動勢E是位置x的偶函數,只能夠反映到水平位置的絕對值lxI的大小,無法分辨左右.為此,我們可以使用相距長度為L的兩個感應線圈,計算兩個線圈感應電動勢的差值:hh_/i2+x2"(x-02F面假設L=30cm,計算兩個線圈電動勢差值Ed如圖所示:0.20150.100530UJ.0OS-0.1N150W,05101520253035Mem圖感應電動勢差值dE與距離x之間的函數從上圖可以看出,當左邊線圈的位置x
19、=15cm的時候,此時兩個線圈的中央恰好處于跑道中央,感應電動勢差值Ed為0.當線圈往左偏移,xe(15,30),感應電動勢差值小于零;反之,當線圈往右偏移,x£(0,15),感應電動勢大于零.因此在位移0-30cm之間,電動勢差值Ed與位移x是一個單調函數.可以使用這個量對于小車轉向進行負反應限制,從而保證兩個線圈的中央位置跟蹤賽道的中央線.通過改變線圈高度h,線圈之間距離L可以調整位置檢測范圍以及感應電動勢的大小.電路設計設計局部圖檢測電路系統框從上面檢測原理可以知道,測量磁場核心是檢測線圈的感應電動勢E的幅值.電磁傳感器的設計主要包括:感應線圈的選擇、信號選頻放大、整流與檢測等
20、幾個方面,將會涉及到電磁場與波、高頻、模電等相關學科的知識點,這里不再詳細的給出各個方案的具體論證過程,直接給出電路設計系統框圖和成熟的實際電路.檢測電路組成如圖所示:圖中虛線局部可以看做另一種方案,即:信號放大以后直接通過單片機AD采樣,而不經過檢波環節,電路框圖如下圖:說明:黑色原理圖為官網給出參數,具體的參數要根據線圈選型等實際情況自己設定,兩種方案各有優勢.倍壓檢波電路可以獲得正比于交流電壓信號有效值的直流信號,處理起來很方便.缺點是由于電容的充放電,信號突變時有延遲,這種現象尤其在入彎時更明顯,使系統的響應變慢.而直接采集放大信號的方案那么有效的克服了這一缺點,但信號處理起來沒有有效
21、值檢波那種方案簡單,而且對AD性能的要求也較高.還有一種用的是檢波以后再送入AD處理信號的方案,事實證實也是可行的.下面給出兩種方案的實際電路圖,如圖和圖所示.圖直接采集放大信號三維電磁傳感器電路圖圖檢波電路對于實際電路圖的說明:電感線圈我們采用的是標準化的“工字型電感線圈,這種線圈感應面積大,靈敏度好,缺點是體積較大.實踐證實這種電感線圈綜合效果還不錯,實際上我們只用兩個水平的線圈即圖6的x軸方向就可以完成尋跡功能,速度和穩定性到達校區水平.缺點是互感現象嚴重.不過也有很多參賽隊用直插式小體積的電感外形和一般直插式電阻一樣,不過比電阻大些.它的一個很明顯的優點就是體積小,性能沒試過,鼓勵大家
22、嘗試更多的選型方案.去年比賽時我們只用到水平方向兩個線圈即圖中的x軸和z軸方向.豎直方向的線圈可以用來檢測前方是否有彎道,也就是提升電磁組前瞻性的解決方案之一.我們當時用單個豎直的傳感器檢測,在直道入彎處可以有3040cm的前瞻性,但實際跑的過程中數據無法有效地利用.參加豎直線圈以后在入彎和十字交叉時檢測到的信號是相似的,因此無法區分一般彎道和十字交叉.這樣x軸方向的線圈用來判斷小車偏離跑道的程度,信號再經過MCU的處理限制舵機的轉向.現在來說明z軸方向線圈的作用.先看小車中央線與賽道重合時的情況:為了便于說明原理,這里只考慮磁場在水平面的投影,豎直方向不予考慮.小車在直道上的示意圖如下圖:I
23、KriI賽道切線圖小車中央線與賽道重合時容易的出:磁場在水平方向的分量x和z軸全部落在X軸上,z軸磁場為0.再來看小車在過彎道時的示意圖,如圖所示.賽道切線圖小車在過彎道時示意圖大家可以看到只用兩個水平X軸線圈時,過彎時兩線圈檢測到感應電動勢的大小可能很接近,而且此時不能反映所有水平方向磁場的信息,由于水平方向Z軸的磁場不為0!所以這時很自然的想到了利用z軸線圈來減小傳感器提取賽道信息不完整而使舵機誤動作或轉向延遲.圖有Z軸線圈時過彎示意圖圖U1位置兩水平線圈過彎時磁部這樣通過計算x和z軸線圈的平方和就可以算出U1位置處磁場水平分量.這相當于對信號的軟件放大,而且使信號精度更高.實際上完全可以
24、參照杭電的傳感器布局,使用一個線圈相對于X軸45.放置,就可以到達圖15所示傳感器布局的效果.由于采用的是相同的電感線圈,可以認為它的電氣特性完全相同.用一個這樣的線圈就可以提取整個水平方向的磁場信息.根據官網的說明,不同方向同一位置的線圈算為一個傳感器.這個“同一個位置沒有明確的限定,靠的近一點、做在同一個板子上就可以了.傳感器的設計與調試實物如下圖:圖直接放大電路實物圖正反兩面說明:大家可以看到,比賽時我們只用到兩個線圈,豎直方向的拆掉了.放大電路如下圖:VCC圖放大電路電路焊接完畢后,只要調節圖11中可調電阻R4,使得三極管集電極電壓處于左右即可.將上述放大電路的感應電感放在通有100m
25、A、20kHz導線周圍,使用示波器觀察電路的輸出與輸入信號,如下圖:s/div.2500points.Samplemodes/div.2500points.SamplemodeDCcoupling.10E0V/div.DCcoupling.50E-2V/div圖放大電路的輸入、輸出波形通過圖可以看出,放大電路的放大倍數大約為:A二意"82倍.所得的電壓信號可以直接連入單片機的AD轉換接口進行采集就可以.但這種方案對AD轉換速率要求較高.這樣AD輸入的交流信號的平均值在,變化范圍在0-5V,滿足單片機AD轉換的需要.檢測方案根本思路以直接采集放大信號的傳感器方案為例,賽道信號為20kh
26、z方波,在采集信號時只要保證單片機的AD采集速率大于20kHz的5-10倍,連續采集5-10個周期的電壓信號大約100數據左右,就可以直接從采集的數據中最大值減去最小值獲得信號的峰峰值.假設采集了128個數據:=1,2,128,計算信號的峰峰值-可以有下式計算:=max(,=1,2,128)=min(,=1,2,128)上面計算計算方法由于只用應用了數據的最大值、最小值,所得結果容易受到噪聲的影響,所以還可以通過計算數據交流信號的平均值、有效值反映信號的幅值:于耳穹勺E2T一劉£產8勺一寵2_128'ave128;6128上面所計算得到的,、等都與信號的峰峰值成單調關系,所以
27、也可以用來進行計算位置差值信號.經驗體會如果采用直接放大信號的傳感器方案,要滿足信號采集的需要,MUC片內AD或者外部AD的數據轉換時間要能到達5us,將近1MSPS!傳統的AVR單片機已近遠遠不能滿足需求了最高分辨率時采樣率15kSPS,msp430fl49的片內AD剛好200ksps,根本滿足需求,飛思卡爾MC9S12XS128轉換速率到達3us,也可以勝任信號采集的需求,不過價格昂貴.這樣的話就需要外部AD來完成信號采集.而且要考慮到線圈的個數會有多個,所以外部AD的通道數也需考慮,串行和并行看大家自己的習慣.我們華東賽區比賽用的是AD公司的8輸入串行spi通信模數轉換器AD7928,轉
28、換率1MSPS,基準電壓芯片用的是AD780,總價在40元左右.而如果采用放大檢波方案的話,對AD就沒有什么那么高的要求了.不僅設計的本錢大幅降低,而且軟件上的復雜度也會大大降低,直觀地看只需要采一次數據就可以提取當前磁場信息.所以如果條件有限,推薦大家使用放大檢波的方案,但這種方案在硬件上會復雜一些,需要的調試工作量也會大一些.從檢波二極管的選擇,到濾波電路參數的計算,都需要有較高模、高頻電根底.不過這更具挑戰性,更能鍛煉自己的水平!為了減輕低年級同學的設計工作量,我們也給出了已經調試過的電路,如圖12所示,供大家參考.其實不管是CCD組、光電組還是電磁組,在軟件方面的根本思路是一致的.通過
29、傳感器提取賽道信息,通過軟件方面的手段計算出當前小車偏離賽道的程度記為“A,要求高的話,像“飛思卡爾杯的話再參加速度反應,綜合考慮當前速度大小和偏離賽道程度,限制舵機的轉向和電機的加減速.有了和速度傳感器返回的值,至于當前“A下鴕機轉多大,電機加速還是減速,加多少減多少,這就需要軟件的算法來計算了.最常見的就是PID和棒棒算法了,另外模糊限制理論在智能車限制領域也用得比擬多.算法方面校區智能車設計指導書第二版會有講解,這里就不說了.本指導只講從AD提取賽道信息到得出“A,以及在整個程序設計時應該注意的問題,軟件整體的設計思路.除了利用上述的、做差可以計算出夕卜,也有其他方法.大家不必拘泥于上面
30、的方法.起跑線檢測關于路徑檢測方法,這里還想說說怎樣檢測起跑線.電磁組檢測起跑線的方法與光電、CCD組的不同,通過硬件即可完成,相對也比擬簡單,所以放在后面講.我們再來看看官網給的起跑線示意圖,如圖所示:4-娓酒土方向50cm圖起跑線示意圖如圖所示,起跑線下面均勻的放置有6個永磁體,磁體放置極性不確定.磁體參數:直徑-15mm,高度外表磁場強度3000-5000Gs.磁體外表磁場強度相對賽道產生的磁場非常大經過計算賽道磁場強度在lOTGs數量級,完全可以不考慮小車會在非起跑線區域檢測起跑線.檢測起跑線的傳感器通常選用干簧管.干簧管相當于一個磁敏開關,分為常開和常閉類型.工作原理很簡單,干簧干里
31、面的磁性導電簧片受到足夠大的磁場磁化以后相互吸合在一起來完成一次開關的動作.電磁組要檢測起跑線,只要干簧管受經過起跑線時受到的磁場作用到達一定程度就可以.考慮到磁體極性不確定,但歸納起來就三種情況:同側三個磁體外表都為同極性相鄰兩兩磁體極性不同®®只有相鄰兩個磁體極性相同經過理論分析和實際測試發現:每個磁體外表中線處磁場為0或者很小,干簧管經過單個磁體外表時不能發生動作,即存在盲區.同名磁體中垂線上磁場為Oo兩磁體中央相距,在小車左右兩側各放一個干簧管顯然是不行的,考慮最壞的情況,兩個相鄰的干簧管中央位置不能是和2cm的整數倍.這樣的話,每側各用兩個就可以了.設計時可以把干
32、簧管并連在一起,左右共兩組,任何一路導通都可以向MCU輸送檢測起跑線的信息.實物圖如度所示:軟件局部的簡要流程圖圖干簧管檢測起跑線實物圖單片機常用模塊PWM模塊PWM調制波有8個輸出通道,每一個輸出通道都可以獨立的進行輸出.每一個輸出通道都有一個精確的計數器計算脈沖的個數,一個周期限制存放器和兩個可供選擇的時鐘源.每一個PWM輸出通道都能調制出占空比從0100%變化的波形.PWM的主要特點:1、 它有8個獨立的輸出通道,并且通過編程可限制其輸出波形的周期.2、 每一個輸出通道都有一個精確的計數器.3、 每一個通道的PWM輸出使能都可以由編程來限制.4、 PWM輸出波形的翻轉限制可以通過編程來實現.5、 周期和脈寬可以被雙緩沖.當通道關閉或PWM計數器為0時,改變周期和脈寬才起作用.6、 8字節或16字節的通道協議.7、 有4個時鐘源可供選擇A、SA、B、SB,他們提供了一個寬范圍的時鐘頻率.8、 通過編程可以實現希望的時鐘周期.9、 具有遇到緊急情況關閉程序的功能.10、每一個通道都可以通過編程實現左對齊輸出還是居中對齊輸出.PWM存放器:PWM啟動存放器PWMEPWME存放器每一位如圖1所示:復位默認值:00000000BBit76543218it0PWME7PWME6PWME5PWME4IPWME3PWME2PWMEIPWME.00000Q00Rea
溫馨提示
- 1. 本站所有資源如無特殊說明,都需要本地電腦安裝OFFICE2007和PDF閱讀器。圖紙軟件為CAD,CAXA,PROE,UG,SolidWorks等.壓縮文件請下載最新的WinRAR軟件解壓。
- 2. 本站的文檔不包含任何第三方提供的附件圖紙等,如果需要附件,請聯系上傳者。文件的所有權益歸上傳用戶所有。
- 3. 本站RAR壓縮包中若帶圖紙,網頁內容里面會有圖紙預覽,若沒有圖紙預覽就沒有圖紙。
- 4. 未經權益所有人同意不得將文件中的內容挪作商業或盈利用途。
- 5. 人人文庫網僅提供信息存儲空間,僅對用戶上傳內容的表現方式做保護處理,對用戶上傳分享的文檔內容本身不做任何修改或編輯,并不能對任何下載內容負責。
- 6. 下載文件中如有侵權或不適當內容,請與我們聯系,我們立即糾正。
- 7. 本站不保證下載資源的準確性、安全性和完整性, 同時也不承擔用戶因使用這些下載資源對自己和他人造成任何形式的傷害或損失。
最新文檔
- 2025年環境檢測與評估技能考試題及答案
- 導游業務試題及答案電大
- 時鐘測試題目大全圖片及答案
- float面試題及答案
- 三體名著試題及答案
- 焊接加工考試題及答案
- 2025年歷史文化與博物館管理考試試題及答案
- 借款咨詢服務協議書
- 機電工程決策支持試題及答案
- 軟件設計師考試學習策略分享試題及答案
- 不固定總價合同模板
- 干部履歷表填寫范本(中共中央組織部1999年)
- 勞動教育視角下高職院校學生工匠精神培育研究
- 最簡單封陽臺安全免責協議書
- SH/T 3533-2024 石油化工給水排水管道工程施工及驗收規范(正式版)
- 用友人力資源管理HR解決方案樣本
- 北京市西城區三帆中學2023-2024學年七年級下學期期中數學試題(無答案)
- 藥物殘留溶劑分析報告書
- 腫瘤醫院推廣方案
- 動物出血性肺炎預防與治療
- 研究生開題報告評審表
評論
0/150
提交評論